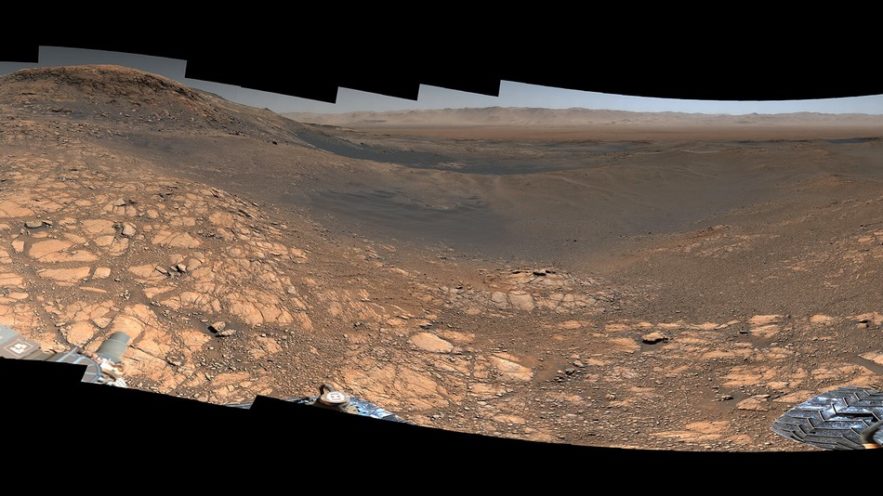
Le rover Curiosity de la NASA a capturé son panorama le plus détaillé à ce jour — avec la résolution la plus élevée — de la surface martienne. Intégrant plus de 1000 images soigneusement assemblées durant plusieurs mois, le composite affiche 1.8 milliard de pixels de paysage martien.
La caméra Mast du rover, ou Mastcam, a utilisé son téléobjectif pour produire le panorama. Cet instrument permet de réaliser des images et des vidéos en couleur de l’environnement martien. La caméra s’est également appuyée sur son objectif à angle moyen pour produire un autre panorama (de près de 650 millions de pixels de résolution inférieure) qui comprend le pont du rover ainsi que son bras robotique.
Les deux panoramas présentent « Glen Torridon », une région située près du mont Sharp, que Curiosity explore et où le rover effectue ses analyses. Les images ont été capturées entre le 24 novembre et le 1er décembre 2019, toutes depuis le même point de vue. Il aura fallu 6 heures pour prendre les différentes photos qui ont ensuite été assemblées dans le panorama.
Les opérateurs Mastcam ont programmé la liste des tâches complexes, qui comprenait le pointage du mât du rover et la mise au point des images. Pour assurer un éclairage uniforme, ils ont confiné l’imagerie entre midi et 14h (heure locale de Mars) chaque jour de prise.
Vous aimerez également : Curiosity observe d’étranges fluctuations d’oxygène sur Mars
Pour nous aider à mieux nous rendre compte de la précision de ce panorama, la NASA a mis en ligne un outil permettant d’effectuer un zoom dans l’image (testez par vous-même) :
« Alors que de nombreux membres de notre équipe étaient chez eux en train de profiter de la dinde (ndlr : les photos ont été prises durant les vacances de Thanksgiving), Curiosity a produit ce véritable régal pour les yeux », a déclaré Ashwin Vasavada, scientifique du projet Curiosity au Jet Propulsion Laboratory de la NASA, qui dirige la mission du rover Curiosity. « C’est la première fois au cours de la mission que nous consacrons nos opérations à un panorama stéréo à 360 degrés », a ajouté Vasavada.

En effet, en 2013 déjà, le rover Curiosity avait produit un panorama de 1.3 milliard de pixels à l’aide des deux caméras Mastcam et ses caméras de navigation en noir et blanc, ou Navcams, fournissaient des images du rover lui-même. Il avait alors photographié une parcelle de sable, également située près du mont Sharp (Aeolis Mons).