Inspirés par la biomécanique des guépards, des chercheurs ont développé un tout nouveau type de robot souple capable de se déplacer plus rapidement, sur des surfaces solides ou dans l’eau, que toutes les générations précédentes de robots souples.
Ce nouveau type de robot, inspiré des guépards, est capable de saisir des objets de manière délicate si nécessaire, mais également avec une grande force lorsqu’il s’agit de soulever des éléments lourds. « Les guépards sont les créatures terrestres les plus rapides, et ils tirent leur vitesse et leur puissance de la flexion de leur colonne vertébrale », explique le Dr Jie Yin, professeur adjoint d’ingénierie mécanique et aérospatiale à la North Carolina State University.
Des robots souples inspirés des guépards
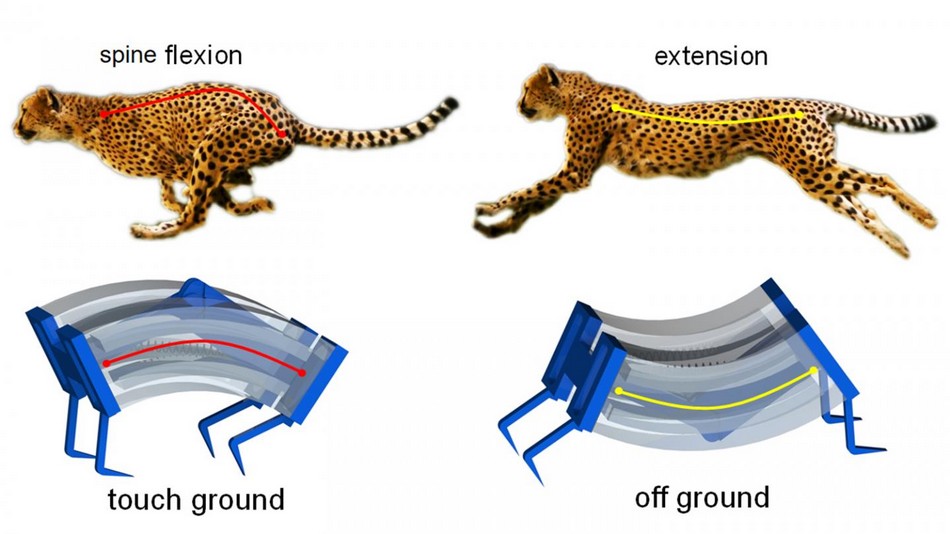
« Nous avons été inspirés par le guépard pour créer un type de robot souple qui possède une colonne vertébrale ‘bistable’, ce qui signifie que le robot a deux états stables », explique Yin. En effet, la colonne vertébrale LEAP (Leveraging Elastic instabilities for Amplified Performance), développée par le chercheur, s’appuie fortement sur la flexibilité naturelle du guépard.
En effet, la caractéristique bistable de la colonne du robot permet d’augmenter considérablement sa vitesse, ce dernier fonctionnant dans deux états (soit dans une position ou dans l’autre) : « Nous pouvons basculer rapidement entre ces états stables en pompant de l’air dans des canaux qui tapissent le robot en silicone souple. La commutation entre les deux états libère une quantité importante d’énergie, permettant au robot d’exercer rapidement une force contre le sol. Cela lui permet de ‘galoper’ sur la surface, ce qui signifie que ses pieds quittent le sol. Les précédents robots souples de ce type étaient des robots rampants, restant en contact avec le sol à tout moment. Cela limite leur vitesse », a détaillé Yin.

 Inspirés par la biomécanique des guépards, des chercheurs ont développé un nouveau type de robot souple capable de se déplacer plus rapidement (que ce soit sur des surfaces solides ou dans l’eau) que toutes les générations précédentes de robots souples. Crédits : Jie Yin/NC State University
Inspirés par la biomécanique des guépards, des chercheurs ont développé un nouveau type de robot souple capable de se déplacer plus rapidement (que ce soit sur des surfaces solides ou dans l’eau) que toutes les générations précédentes de robots souples. Crédits : Jie Yin/NC State UniversityJusqu’à présent, les robots souples les plus rapides pouvaient se déplacer à des vitesses allant jusqu’à 0,8 longueur de corps par seconde, sur des surfaces planes et solides. Mais ces tous nouveaux robots souples sont capables d’atteindre des vitesses allant jusqu’à 2,7 longueurs de corps par seconde (soit trois fois plus rapide), à une faible fréquence d’actionnement, d’environ 3 Hz.
Ces nouveaux robots sont également capables de gravir des pentes abruptes, ce qui peut être difficile (voire impossible) pour les robots souples qui exercent moins de force contre le sol. Ces robots LEAP « galopants », mesurent environ 7 centimètres de long et pèsent environ 45 grammes.
Les chercheurs ont également démontré que la technologie des robots LEAP pouvait améliorer la vitesse de nage pour les robots souples. En fixant une nageoire plutôt que des pieds, un robot LEAP est capable de nager à une vitesse de 0,78 longueur de corps par seconde, contre 0,7 longueur de corps par seconde pour le précédent robot souple de natation le plus rapide. Les robots LEAP peuvent donc même être utilisés sous l’eau pour propulser un poisson robotisé, de 32% à 122% plus rapidement que d’autres robots souples et hybrides.
Vous aimerez également : Découvrez les Xénobots : les premiers organismes robotiques biosynthétiques développés à partir de cellules vivantes
« Nous avons également démontré l’utilisation de plusieurs robots souples travaillant ensemble, comme des tenailles, pour saisir des objets. En réglant la force exercée par les robots, nous avons pu soulever des objets aussi délicats qu’un œuf, ainsi que des objets pesant 10 kilogrammes, ou plus », a expliqué Yin.
Des nombreuses applications potentielles
Les chercheurs soulignent que ce travail sert de preuve de concept, et sont optimistes quant à la possibilité de modifier la conception des robots LEAP pour les rendre encore plus rapides et plus puissants qu’ils ne le sont déjà actuellement.


« Les applications potentielles incluent des technologies de recherche et de sauvetage, où la vitesse est essentielle, ainsi que le domaine de la robotique de fabrication industrielle. Par exemple, nous pourrions imaginer une robotique de ligne de production plus rapide, mais toujours capable de manipuler des objets fragiles », a déclaré Yin. « Nous sommes prêts à collaborer avec le secteur privé pour affiner les moyens d’intégrer cette technologie dans leurs opérations », a ajouté Yin.
Yin et son équipe de recherche espèrent pouvoir développer des modules avec une stabilité multiple, ce qui signifie qu’ils ont plusieurs états stables, au lieu des états binaires actuellement utilisés. Cela permettrait aux robots d’effecteur des mouvements encore plus compliqués et plus complexes.