⇧ [VIDÉO] Vous pourriez aussi aimer ce contenu partenaire
Embarqué à bord de Perseverance pour servir de preuve de concept, Ingenuity — l’hélicoptère martien de la NASA — surpasse déjà toutes les attentes des ingénieurs. Ses huit premiers vols d’essai ont démontré ses performances de vol, sa capacité à naviguer correctement et à se poser de manière stable sur le sol martien. Mais en vue du Vol 9, l’appréhension régnait au sein de la NASA. Pour la première fois, l’engin devait parcourir un terrain accidenté (incluant une plongée dans un cratère), alors qu’il n’est initialement pas configuré pour cela. Non seulement la manœuvre s’est correctement déroulée, mais Ingenuity est en outre revenu avec des images en couleurs du sol martien.
Le Vol 9 n’était pas comme les vols qui l’ont précédé. Il a battu les records de durée de vol et de vitesse de croisière, et il a presque quadruplé la distance parcourue entre deux aérodromes. Mais ce qui a vraiment distingué ce vol, c’est le terrain qu’Ingenuity a dû négocier pendant ses 2 minutes et 46 secondes dans les airs — une zone appelée Séítah qui serait difficile à traverser avec un véhicule terrestre comme le rover Perseverance. Ce vol a également été explicitement conçu pour avoir une valeur scientifique en fournissant la première vue rapprochée des principales cibles d’étude que le rover n’atteindra pas avant un certain temps.
Dans chacun de ses vols précédents, Ingenuity a sauté d’un aérodrome à un autre sur un terrain en grande partie plat. Lors de la planification des vols précédents, les opérateurs ont pris soin d’éviter de survoler un cratère. Mais lors du Vol 9, l’engin a commencé par plonger dans ce qui ressemble à un cratère fortement érodé, puis a continué à descendre sur un terrain en pente et vallonné avant de remonter à nouveau pour émerger sur une plaine plate au sud-ouest.
Ingenuity : un hélicoptère conçu pour survoler des surfaces planes
Il peut sembler étrange que les détails du terrain soient aussi importants pour un véhicule qui voyage dans les airs. La raison est liée au système de navigation d’Ingenuity et à ce pour quoi il a été conçu à l’origine : une brève démonstration technologique sur un site de test expérimental soigneusement choisi.
Lorsque nous, les êtres humains, regardons des images en mouvement du sol, telles que celles prises par la caméra de navigation d’Ingenuity, nous avons instantanément une assez bonne compréhension de ce que nous regardons. Nous voyons des rochers et des ondulations, des ombres et de la texture, et les reliefs du terrain sont relativement évidents. Ingenuity, cependant, n’a pas la perception humaine et la compréhension de ce qu’il regarde. Il voit le monde en matière de caractéristiques individuelles et anonymes — essentiellement des points qui se déplacent avec le temps — et il essaie d’interpréter le mouvement de ces points.
Pour faciliter ce travail, les ingénieurs ont aidé l’algorithme de navigation d’Ingenuity : ils lui ont indiqué que toutes ces structures sont situées sur un terrain plat. Cela a libéré l’algorithme de la nécessité de calculer les variations de hauteur du terrain et lui a permis de se concentrer sur l’interprétation du mouvement des éléments par les seuls mouvements de l’hélicoptère. Mais des complications surviennent s’il essaie ensuite de survoler un terrain qui n’est pas vraiment plat.
Les différences de hauteur du terrain entraîneront le déplacement des entités dans le champ de vision à des vitesses différentes, et l’algorithme de navigation d’Ingenuity « suppose » toujours que le sol en dessous est plat. Il s’efforce d’expliquer le mouvement des éléments par des changements dans les mouvements de l’hélicoptère, ce qui peut conduire à des erreurs. Plus important encore, cela peut entraîner des erreurs dans le cap estimé, ce qui entraînera le vol de l’hélicoptère dans une direction différente de celle prévue.
Un fonctionnement soigneusement ajusté et des images couleurs en récompense
L’hypothèse selon laquelle le sol est plat est intégrée dans la conception de l’algorithme, et cela est impossible à changer lors de la planification des vols. Les opérateurs ne peuvent qu’anticiper les problèmes qui surgiront en raison de cette hypothèse et les atténuer le plus possible en termes de planification des vols et de paramètres donnés au logiciel.
Mars from the air is amazing.
These images were taken by #Ingenuity on July 5, 2021 (sol 133), during the #MarsHelicopter‘s 9th flight on Mars. Check out those amazing rover tracks and rock formations!
Des outils de simulation permettent d’étudier en détail l’issue probable du vol avant de l’effectuer. Pour le Vol 9, une adaptation clé du plan de vol était de réduire la vitesse au point crucial lors de la plongée dans le cratère. Bien que cela se soit fait au prix d’une prolongation du temps de vol, cela a permis d’atténuer les erreurs de cap précoces qui pouvaient se transformer en une importante erreur de position transversale.
Certains des paramètres détaillés de l’algorithme de navigation non modifiés jusqu’à présent lors des vols précédents ont également été ajustés. Et un terrain de vol beaucoup plus grand que lors des vols précédents a été déterminé, avec un rayon de 50 mètres. L’engin a fini par atterrir à environ 47 mètres du centre de cet aérodrome.
Dans la semaine à venir, Ingenuity enverra des images en couleur que les scientifiques de Perseverance ont hâte d’étudier. Les affleurements rocheux capturés sur ces images montrent des contacts entre les principales unités géologiques du sol du cratère Jezero. Ils comprennent également un système de fractures que l’équipe de Persévérance appelle « Raised Ridges », que les planétologues espèrent étudier en partie pour déterminer si un ancien habitat souterrain pourrait y être préservé.


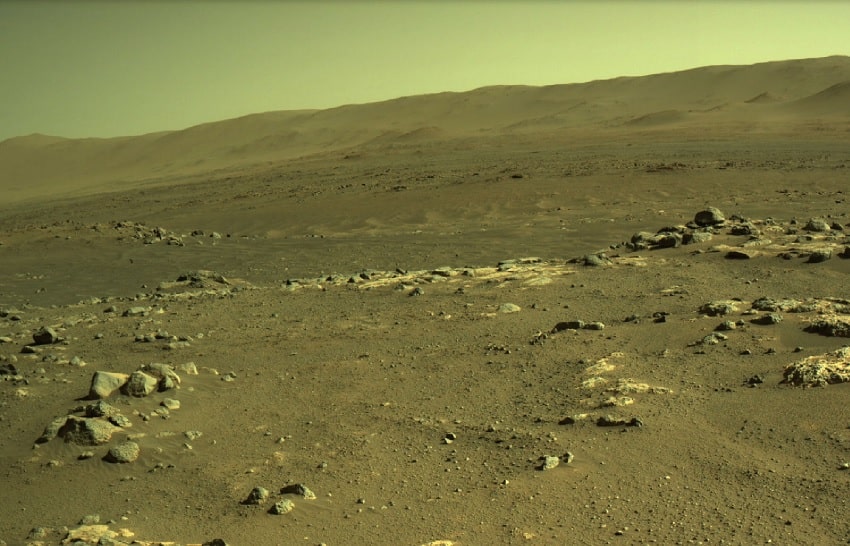 Photo de la région martienne Séítah prise par le rover Perseverance. Ingenuity a survolé cette zone accidentée lors du Vol 9. © NASA/JPL-Caltech
Photo de la région martienne Séítah prise par le rover Perseverance. Ingenuity a survolé cette zone accidentée lors du Vol 9. © NASA/JPL-Caltech
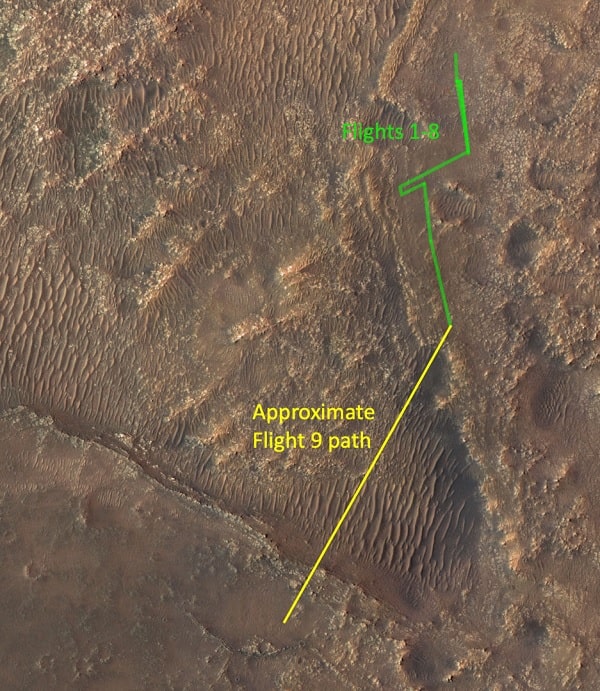 Carte montrant la trajectoire prise par Ingenuity lors du Vol 9 (en jaune). © NASA/JPL-Caltech
Carte montrant la trajectoire prise par Ingenuity lors du Vol 9 (en jaune). © NASA/JPL-Caltech