Comment les réflexes des animaux leur permettent-ils d’apprendre à marcher en aussi peu de temps ? Des chercheurs de l’Institut Max Planck pour les systèmes intelligents se sont penchés sur la question. Pour y répondre, ils ont cependant plutôt utilisé la robotique que la biologie. Pour l’étude, ils ont conçu un robot capable d’apprendre à marcher, sans instruction préalable, en seulement une heure.
C’est ainsi qu’est né « Morti », un chien-robot conçu pour étudier le développement de la marche chez les jeunes animaux. « Faire des recherches sur la moelle épinière d’un animal vivant est complexe. Mais en utilisant un robot, nous pouvons en modéliser une », explique Alexander Badri-Spröwitz, qui a co-écrit la publication, dans un communiqué de l’Institut. Les recherches ont été publiées dans la revue Nature Machine Intelligence.
Bien entendu, les scientifiques savent déjà de nombreuses choses sur le fonctionnement moteur des animaux. En effet, comme le rappelle le communiqué, les animaux naissent avec des réseaux de coordination musculaire intégrés dans leur moelle épinière. Ils apprennent donc très rapidement à marcher pour échapper aux prédateurs. Ils se reposent au début sur ces données un peu basiques, mais qui leur permettent de commencer à se déplacer. Par la suite, ils apprennent à coordonner plus précisément les muscles et les tendons. Leurs mouvements deviennent peu à peu plus fluides, mais cela leur demande de la pratique.
Les scientifiques affirment que ces deux étapes sont dirigées par deux mécanismes. Chez les humains et les animaux, il existe ce qu’ils appellent des « générateurs de motifs centraux » (CPG), c’est-à -dire des réseaux de « neurones » dans la moelle épinière qui produisent des contractions musculaires périodiques sans intervention du cerveau. Ce mécanisme intervient pour les tâches très répétitives, comme cligner des yeux, marcher, etc. Il s’agit de tâches basiques, qui ne requièrent pas d’être vraiment reliées au cerveau. En plus de cela, interviennent les « réflexes ». Il s’agit d’actions de mouvement involontaires, expliquent les scientifiques, qui sont aussi directement câblées à la moelle épinière, et non au cerveau.
Une moelle épinière virtuelle
Concrètement, sur une surface plane sans embûches, le générateur de motifs centraux fonctionne. Les réflexes entrent dans la danse quand il y a quelque chose d’inhabituel, un creux, une bosse, etc. Chez l’animal nouveau-né, les CPG ne sont initialement pas encore assez bien ajustés et l’animal trébuche, qu’il s’agisse d’un terrain plat ou accidenté. Avec le temps, il apprend comment ses réflexes et ses « motifs centraux » contrôlent ses mouvements, et s’améliore. Autrement dit, l’expérience sur le terrain corrige petit à petit des données préexistantes sur la marche. Pourtant, connaître les détails de ce fonctionnement n’est pas chose aisée. Les scientifiques ont donc décidé de passer par la robotique.
« En tant qu’ingénieurs et roboticiens, nous avons cherché la réponse en construisant un robot doté de réflexes comme un animal et apprenant de ses erreurs », explique Felix Ruppert, l’un des auteurs. Ils ont donc couplé un programme de base à un algorithme d’apprentissage automatique. Autrement dit, ils ont commencé par créer une « moelle épinière » virtuelle, qu’ils ont fixée sur la tête du robot chien. Les chercheurs n’ont fourni aucune information de base à Morti sur la forme de son corps, ses moteurs, ses ressorts…

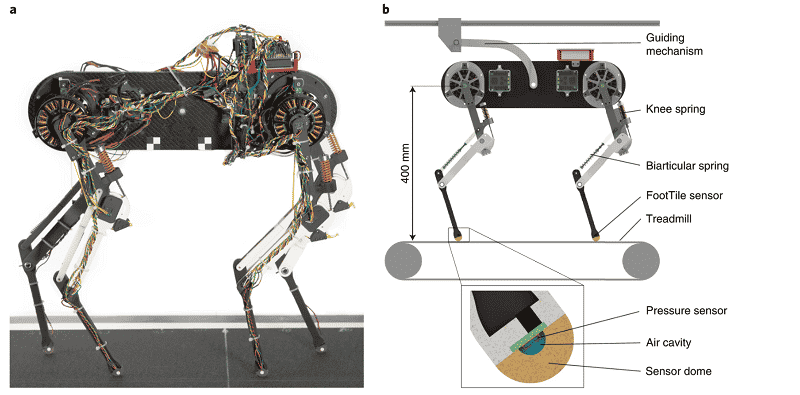
L’algorithme d’apprentissage permettait donc de comparer les informations sensorielles perçues au programme de base du robot pour améliorer peu à peu ses capacités. Le chien robot conçu par les chercheurs s’est révélé capable d’apprendre, de la même façon que les animaux, à marcher : et même plus rapidement qu’un animal, puisqu’il ne lui a fallu qu’une heure pour arriver à une bonne coordination de ses mouvements. Durant ce temps, les données des capteurs des pieds (pattes) ont été continuellement comparées à l’atterrissage prévu par le CPG du robot. Lorsque le robot trébuchait, l’algorithme adaptait la vitesse d’oscillation des jambes, la distance, la durée de contact au sol, etc.
« Nous savons que ces CPG existent chez de nombreux animaux. Nous savons que les réflexes sont intégrés ; mais comment combiner les deux pour que les animaux apprennent des mouvements avec des réflexes et des CPG ? Il s’agit d’une recherche fondamentale à l’intersection entre la robotique et la biologie. Le modèle robotique nous permet de répondre à des questions auxquelles la biologie seule ne peut pas répondre », affirment les scientifiques.