Une équipe de scientifiques est parvenue à relier des composants électroniques au système nerveux de blattes de Madagascar, de manière à prendre le contrôle de leurs mouvements. Ce guidage à distance se fait par stimulation des cerques des insectes (des appendices situés à l’extrémité de leur abdomen). Cette technologie pourrait un jour être exploitée pour des missions de recherche et de sauvetage en milieu urbain, de surveillance de l’environnement ou d’inspection de zones dangereuses.
Ce n’est pas la première fois qu’une équipe développe de tels insectes robotisés. Néanmoins, les dispositifs proposés jusqu’à présent avaient des fonctionnalités et un champ d’action limités de par l’énergie disponible. En effet, le contrôle à distance implique l’emploi de batteries, qui sont nécessairement de volume et de poids restreints au vu de la taille des insectes. Une stratégie consiste à faire revenir l’insecte cyborg à une zone de recharge avant que sa batterie ne s’épuise, mais cette approche demeure peu pratique (en particulier dans un contexte d’urgence).
Une alternative consiste à ajouter un dispositif de collecte d’énergie directement sur l’insecte, sous la forme d’une biopile enzymatique. Mais la puissance de sortie la plus élevée obtenue par ce moyen est de 333 μW (microwatts). Or, le contrôle de la locomotion sans fil (comme d’autres fonctions avancées) nécessite plusieurs milliwatts. Une équipe japonaise du RIKEN a donc eu l’idée d’utiliser une cellule solaire — celle-ci pouvant générer 10 mW/cm2, voire plus dans des conditions d’ensoleillement. Le module solaire organique ultramince qu’ils ont conçu a atteint une puissance de sortie de 17,2 mW.
Un dispositif qui s’adapte parfaitement à la morphologie de l’insecte
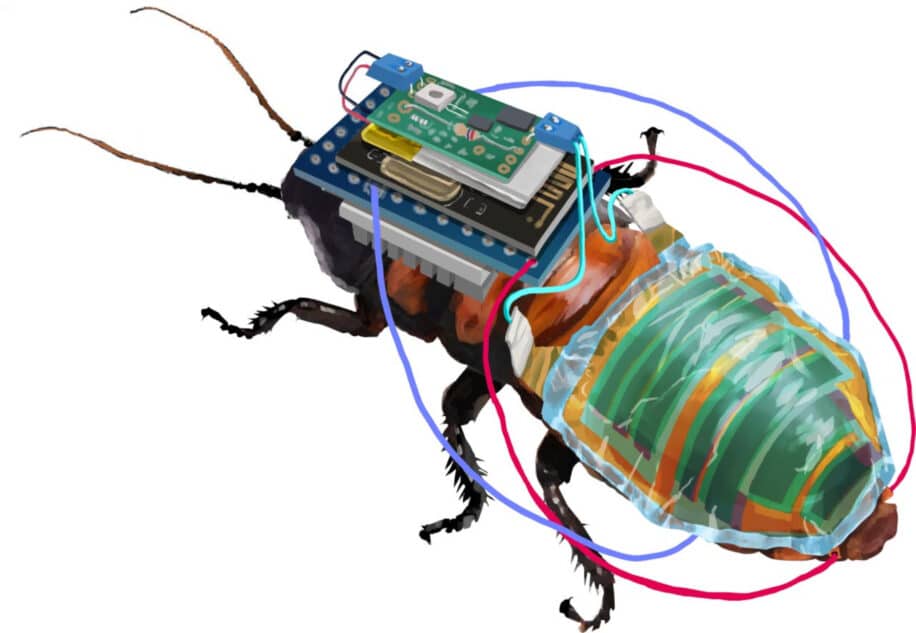
Les chercheurs ont donc créé des blattes cyborgs télécommandées, équipées d’un module de commande sans fil alimenté par une batterie rechargeable fixée à une cellule solaire. Les insectes utilisés, des blattes de Madagascar (Gromphadorhina portentosa), peuvent mesurer jusqu’à 6 ou 7 centimètres de long ; l’équipe a donc dû développer un dispositif portable minuscule, contenant tous les composants nécessaires, qui resterait solidement attaché sur le dos de l’insecte sans entraver ses mouvements naturels.
Pour ce faire, ils ont utilisé un modèle de blatte imprimé en 3D avec un polymère élastique. Leur produit final ressemble à un petit sac à dos, qui se conforme parfaitement à la surface incurvée de l’insecte et peut rester stable sur le thorax pendant plus d’un mois ; il comporte le module de contrôle sans fil et la batterie au lithium-polymère. La cellule solaire organique ultramince (de 4 µm d’épaisseur) a été montée à l’arrière de l’abdomen ; son poids par surface effective est d’environ 5 g/m2.

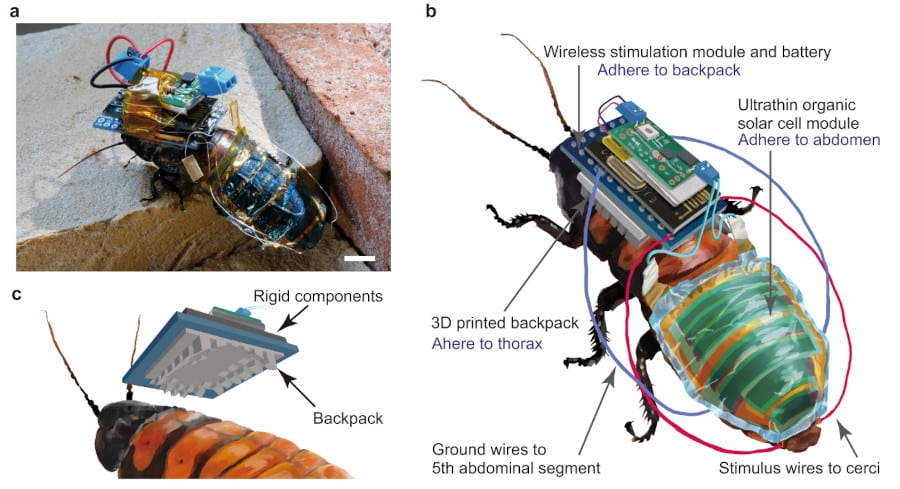 a) Photographie d’une blatte cyborg (barre d’échelle, 10 mm). b) Schéma du dispositif de contrôle à distance. c) Schéma du montage de composants rigides sur le thorax à l’aide d’un sac à dos imprimé en 3D. © Y. Kakei et al.
a) Photographie d’une blatte cyborg (barre d’échelle, 10 mm). b) Schéma du dispositif de contrôle à distance. c) Schéma du montage de composants rigides sur le thorax à l’aide d’un sac à dos imprimé en 3D. © Y. Kakei et al.Les matériaux flexibles et l’électronique ultramince utilisés ne gênent absolument pas les mouvements des blattes. Pour s’en assurer, les scientifiques ont examiné de près les mouvements naturels de ces insectes : il se trouve que leur abdomen change de forme et que certaines parties de l’exosquelette se chevauchent au cours du déplacement. Pour tenir compte de cela, ils ont intercalé des sections adhésives et non adhésives sur les films des cellules solaires — de manière à les rendre à la fois fixes et flexibles.

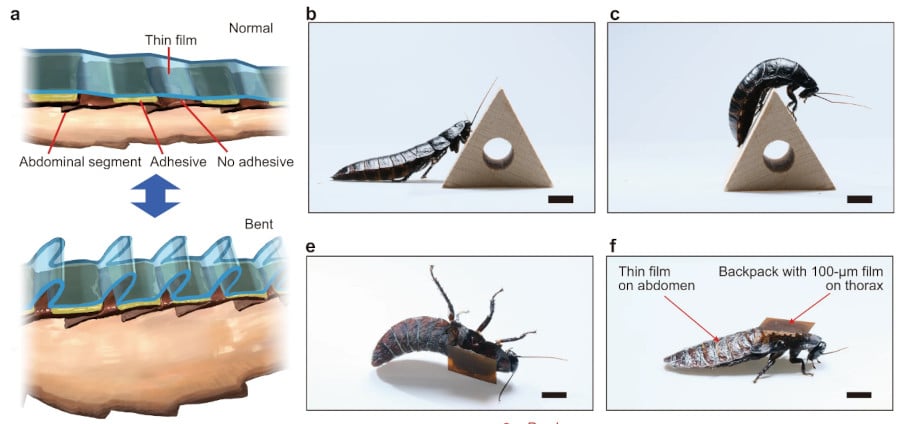 Illustration schématique en coupe transversale de segments abdominaux avec des films minces attachés à l’aide d’une structure d’entrelacement adhésif-non adhésif. Celle-ci permet une flexion vers l’extérieur des films minces lors de la déformation de l’abdomen. © Y. Kakei et al.
Illustration schématique en coupe transversale de segments abdominaux avec des films minces attachés à l’aide d’une structure d’entrelacement adhésif-non adhésif. Celle-ci permet une flexion vers l’extérieur des films minces lors de la déformation de l’abdomen. © Y. Kakei et al.Ils ont testé au préalable des films plus épais ou uniformément fixés, mais les blattes mettaient deux fois plus de temps à parcourir la même distance et avaient du mal à se redresser lorsqu’elles se retrouvaient sur le dos. « Une combinaison d’électronique à film ultramince et d’une structure d’entrelacement adhésive-non-adhésive sur l’abdomen de l’insecte a montré un taux de réussite supérieur à 80% dans les tentatives d’autoredressement », rapportent les chercheurs dans npj flexible electronics.
L’ajout de capteurs et de caméras déjà envisagé
Ainsi équipés, les insectes cyborgs ont été testés : la batterie a été chargée avec la lumière du Soleil simulée pendant 30 minutes, et les blattes ont été amenées à tourner à gauche et à droite à l’aide d’une télécommande sans fil. Des impulsions électriques appliquées sur les cerques de l’insecte — deux appendices situés à l’extrémité de son abdomen, qui sont des nerfs sensoriels — incitent la blatte à se déplacer dans l’une ou l’autre direction.


Le dispositif s’est avéré tout à fait fonctionnel. « Le module de cellules solaires organiques ultraminces monté sur le corps atteint une puissance de 17,2 mW, ce qui est plus de 50 fois supérieur à la puissance de sortie des dispositifs actuels de collecte d’énergie sur des insectes vivants », a déclaré Kenjiro Fukuda, qui a dirigé l’équipe.
La consommation d’énergie mesurée du système de contrôle de la locomotion sans fil était de 73,3 mW. La batterie (40 mA h) a duré environ deux heures après avoir été complètement chargée. « Dans le système actuel, la majeure partie de la consommation d’énergie était utilisée dans les communications sans fil. En ajustant les intervalles de communication, la batterie peut durer plus longtemps », soulignent les chercheurs dans leur article.
D’autres améliorations sont prévues avant que cette armée de blattes cyborgs ne soit un jour envoyée en mission. En effet, le système actuel ne dispose que d’un système de contrôle de locomotion sans fil, ce qui n’est pas suffisant pour préparer une application telle que le sauvetage urbain. « En intégrant d’autres dispositifs nécessaires, tels que des capteurs et des caméras, nous pouvons utiliser nos insectes cyborgs à de telles fins », a déclaré Fukuda à CNET. Ces composants nécessiteront toutefois un apport d’énergie supérieur.
Fukuda a également souligné dans un communiqué que la déformation de l’abdomen n’est pas propre aux blattes, la stratégie peut donc être adaptée à l’avenir à d’autres insectes comme les coléoptères, ou peut-être même à des insectes volants comme les cigales.