Chacun de nos gestes s’appuie sur la conscience de notre propre corps. Ce schéma corporel est établi peu à peu par notre cerveau, au début de la vie, à partir de nos perceptions. Cet automatisme nous permet de nous mouvoir sans heurter les objets alentour ni tomber. Pour la première fois, des ingénieurs ont créé un robot capable d’apprendre lui aussi un modèle de son corps ; cet « auto-modèle » lui permet de planifier ses mouvements selon les situations.
Le schéma corporel est essentiel aux animaux, y compris aux humains, pour planifier et contrôler leurs actions. Jusqu’à présent, cette capacité à modéliser automatiquement tout son corps n’avait jamais été intégrée à une machine. Une équipe de Columbia Engineering a relevé le défi : pour la première fois, ils ont conçu un robot capable d’apprendre un modèle de l’ensemble de son corps à partir de zéro. Non seulement cet auto-modèle lui permet de se déplacer en évitant les obstacles, mais il lui donne la capacité de percevoir (et de compenser) les dommages causés à son corps.
La capacité des robots à s’automodéliser sans assistance humaine représente un intérêt certain : cela leur permet d’envisager les résultats de multiples actions futures possibles sans les essayer dans la réalité physique. Non seulement cela allège la charge de travail humaine, mais cela permet également au robot de suivre sa propre usure, voire de compenser les dommages éventuels, ce qui les rend encore plus autonomes. « Si un robot, un animal ou un humain a un modèle de lui-même précis, il peut mieux fonctionner dans le monde, il peut prendre de meilleures décisions et il a un avantage évolutif », souligne Hod Lipson, professeur de génie mécanique et directeur du Creative Machines Lab de Columbia, où a été conçu le robot.
Relier chaque mouvement à un modèle d’occupation de l’espace
« Quelque part dans notre cerveau, nous avons une notion de nous-même, un modèle de nous-même qui nous informe du volume de notre environnement immédiat que nous occupons et de la façon dont ce volume change lorsque nous nous déplaçons », explique Boyuan Chen, professeur adjoint à l’Université Duke et premier auteur de l’étude décrivant le robot. Restait à trouver le moyen d’inculquer cette conscience de soi à une machine.
Les progrès récents en matière d’automodélisation ont permis aux machines d’apprendre leur propre cinématique directe, à partir des données d’interaction liées à la tâche. Cependant, même les modèles les plus avancés ne peuvent prédire que des aspects limités de la morphologie, notamment l’angle d’inclinaison, la position des effecteurs finaux ou la vitesse des articulations motrices. Ces compétences limitées ne fonctionnent pas dans des espaces de travail encombrés où le risque de collisions doit aussi être pris en compte.
Le travail réalisé par Lipson et son équipe a consisté à modéliser l’ensemble de la morphologie et de la cinématique, mais sans savoir au préalable quels aspects de cette morphologie seront utiles aux tâches futures. Les auto-modèles résultants — dirigés par des requêtes d’occupation de l’espace, conditionnées par l’état du robot — sont plus efficaces en mémoire, entièrement différentiables, et peuvent être utilisés dans un plus large éventail de tâches (récupération d’objets, planification de trajectoire, interaction homme-robot, etc.), expliquent les chercheurs dans Science Robotics.
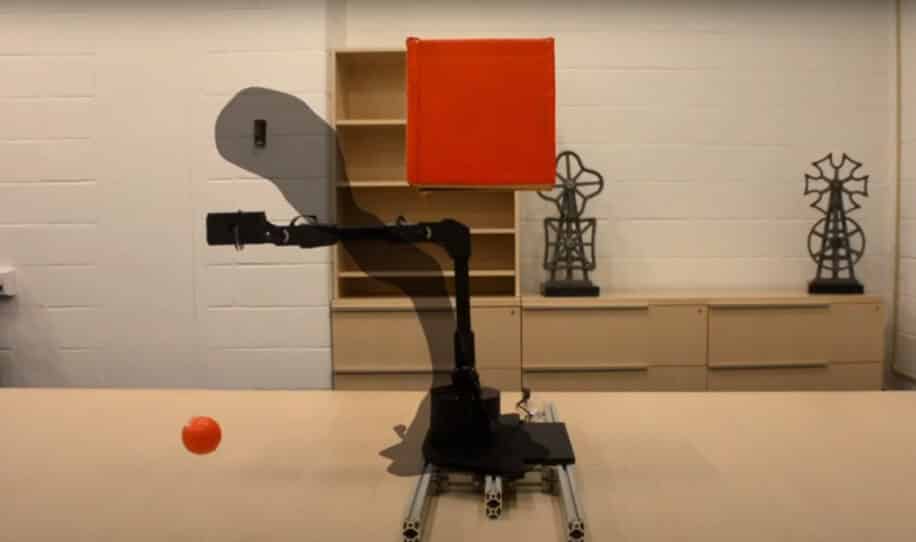
Pour ce faire, le robot (un bras robotique) a été placé dans un espace encerclé de cinq caméras vidéo en streaming, de manière à ce qu’il s’observe à travers les caméras alors qu’il effectuait différents mouvements. Le robot devait apprendre comment se comportait son corps — à savoir quel volume il occupait et dans quelles directions — en réponse à diverses commandes motrices. Il s’est arrêté au bout de trois heures environ, une fois que son réseau de neurones avait complètement enregistré les relations entre mouvement et volume occupé.
Une capacité qui améliore la résilience de la machine
Quelle forme de schéma corporel le robot avait-il créée ? Grâce à diverses techniques de visualisation, cette conscience de soi robotique a émergé sous la forme d’une « sorte de nuage scintillant doucement », notent les chercheurs. « Alors que le robot se déplaçait, le nuage scintillant le suivait doucement », a ajouté Lipson. À mesure de l’apprentissage, ce nuage épousait de plus en plus parfaitement la forme réelle du robot. L’auto-modèle visuel s’est avéré précis à environ 1% de l’espace de travail, permettant au robot d’effectuer diverses tâches de planification et de contrôle du mouvement.

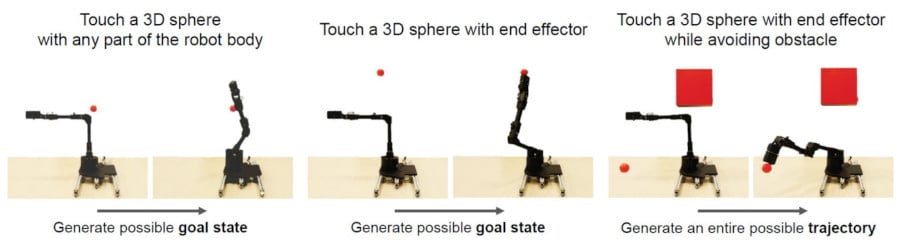
L’équipe a ensuite soumis son robot à diverses expériences physiques pour tester son auto-modèle. Dans la première tâche, le robot devait toucher une sphère avec n’importe quelle partie de son corps ; chaque essai a pris 2,92 s, en moyenne. Dans la seconde tâche, il devait la toucher avec l’extrémité de son bras articulé (4,93 s, en moyenne). Enfin, dans la troisième tâche, il devait atteindre une sphère en évitant un gros cube servant d’obstacle : il a fallu un peu plus de sept secondes au robot pour élaborer la meilleure trajectoire. Les chercheurs rapportent un taux de réussite de 97% sur cette tâche.
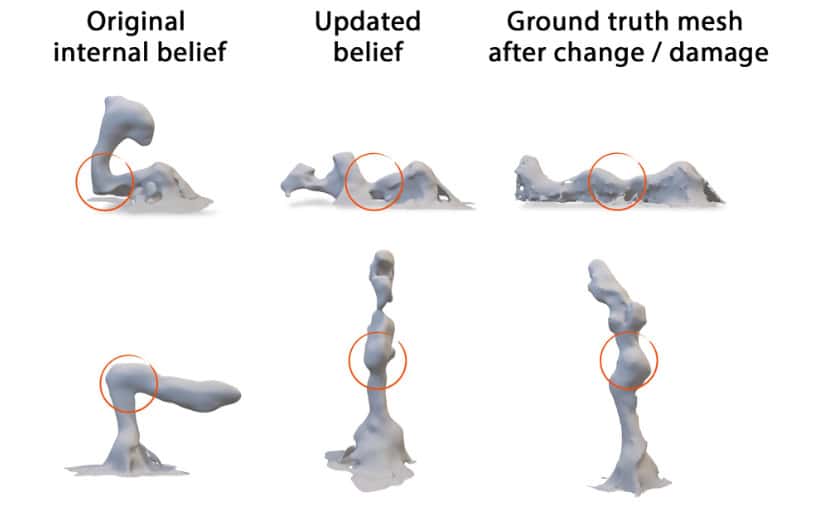
L’équipe a également montré à quel point leur robot faisait preuve de résilience : il était capable de détecter un changement (dommage matériel, modification de la topologie, etc.), d’identifier le type de changement et d’y remédier de lui-même. Les chercheurs ont par exemple volontairement désactivé l’un de ses quatre moteurs articulaires ou ont ajouté une extension au bout du bras robotique. Il a fallu moins de 10 minutes à la machine pour ajuster son schéma corporel en conséquence.
Bien entendu, l’équipe du projet est consciente des limites, des risques et des controverses qui entourent l’octroi aux machines d’une plus grande autonomie par la conscience de soi. Mais Lipson se veut rassurant : il affirme que le type de conscience de soi démontré dans cette étude est « insignifiant par rapport à celui des humains ». « Nous devons y aller lentement et prudemment, afin de pouvoir récolter les bénéfices tout en minimisant les risques », conclut-il.