Une peau artificielle capable de ressentir le toucher… C’est le défi dans lequel se sont lancés des chercheurs de Meta, anciennement Facebook, en collaboration avec des scientifiques de l’université pennsylvanienne de Carnegie Mellon. Ils viennent de rendre publiques leurs avancées sur la technologie ReSkin.
ReSkin, c’est une « peau » capable de sentir son environnement par le toucher… Développée par des chercheurs de Meta et de l’université Carnegie Mellon, elle représente un grand potentiel pour la recherche, dans un domaine encore bien moins exploré que le visuel, ou le son.
Très concrètement, cette peau se compose d’une couche d’élastomère déformable, à laquelle on a adjoint des particules magnétiques. L’ensemble du dispositif fait entre deux et trois millimètres d’épaisseur, et tient sur la surface d’une pièce de monnaie.
Quand ReSkin rend « sensible » un robot
Le procédé qui rend ReSkin fonctionnel est relativement simple. Comme des particules magnétiques sont intégrées dans la « peau », lorsqu’elle touche un objet, ou le saisit, le signal magnétique émis change. Un magnétomètre, capable de détecter cette variation à distance, est couplé à un algorithme d’apprentissage automatique.
Cette intelligence artificielle peut alors envoyer un « retour » au dispositif sur lequel est fixée la peau. Dans l’un des cas testés, la technologie a par exemple permis à une pince robotique d’adapter la localisation de sa saisie ainsi que la pression exercée sur l’objet. Elle a même été capable de saisir avec délicatesse une myrtille, un fruit pourtant réputé très fragile ! Les chercheurs affirment que les données transmises peuvent couvrir un grand nombre de manipulations, comme le fait de jeter quelque chose, ou encore l’attraper, le faire glisser…

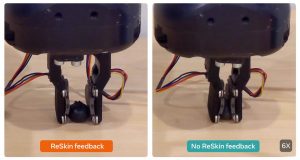 À gauche, une pince dotée de la peau artificielle ReSkin saisit une myrtille. À droite, la même pince dépourvue du retour sensoriel de la peau (le fruit est écrasé). © Facebook AI
À gauche, une pince dotée de la peau artificielle ReSkin saisit une myrtille. À droite, la même pince dépourvue du retour sensoriel de la peau (le fruit est écrasé). © Facebook AIPourquoi est-ce une avancée ?
La technologie ReSkin est loin d’être pionnière en matière de recherche sur le tactile. Les chercheurs pensent toutefois qu’elle en constitue un tournant majeur. En effet, les recherches menées jusqu’ici reposaient sur un seul capteur, spécifiquement calibré pour produire un sens de la pression, de la localisation… Si les résultats obtenus étaient satisfaisants, le défaut majeur est qu’il fallait recalibrer les outils à chaque fois que le capteur était changé. En résumé, il fallait “réapprendre” au capteur à toucher correctement.
À l’inverse, les capteurs utilisés pour ReSkin sont très simples, et facilement remplaçables. Le cœur du dispositif repose plutôt dans l’algorithme d’apprentissage, qui peut s’appliquer de la même façon une fois que l’on a remplacé la « peau ».

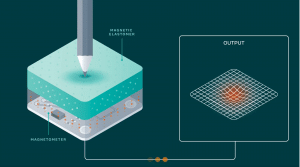 À gauche, un exemple de stimulation tactile sur un morceau de peau ReSkin. À droite, le signal (« sortie ») interprété par le dispositif. © Facebook AI
À gauche, un exemple de stimulation tactile sur un morceau de peau ReSkin. À droite, le signal (« sortie ») interprété par le dispositif. © Facebook AICette spécificité ouvre le champ à une réutilisation cumulative des données. En d’autres termes, les scientifiques travaillant sur le toucher n’auront plus besoin de repartir de zéro à chaque fois. Ils pourront bénéficier des recherches précédentes, tout en utilisant un outil peu coûteux (moins de 30 $) et facilement remplaçable.
Une technologie open source
Une des difficultés qui pourrait se poser est qu’il peut tout de même y avoir de petites variations entre les capteurs utilisés, étant donné que l’élastomère est relativement mou. Cependant, les chercheurs comptent sur la multiplicité des données recueillies par tous les chercheurs qui travailleront sur le sujet pour créer un modèle généralisable.
Les équipes de Meta et de l’université de Carnegie Mellon ont d’ailleurs décidé de mettre en accès open source le fruit de leurs recherches : le design, le code, la documentation, les modèles de base… Tout ceci sera accessible librement, pour permettre aux recherches d’avancer plus rapidement et efficacement.
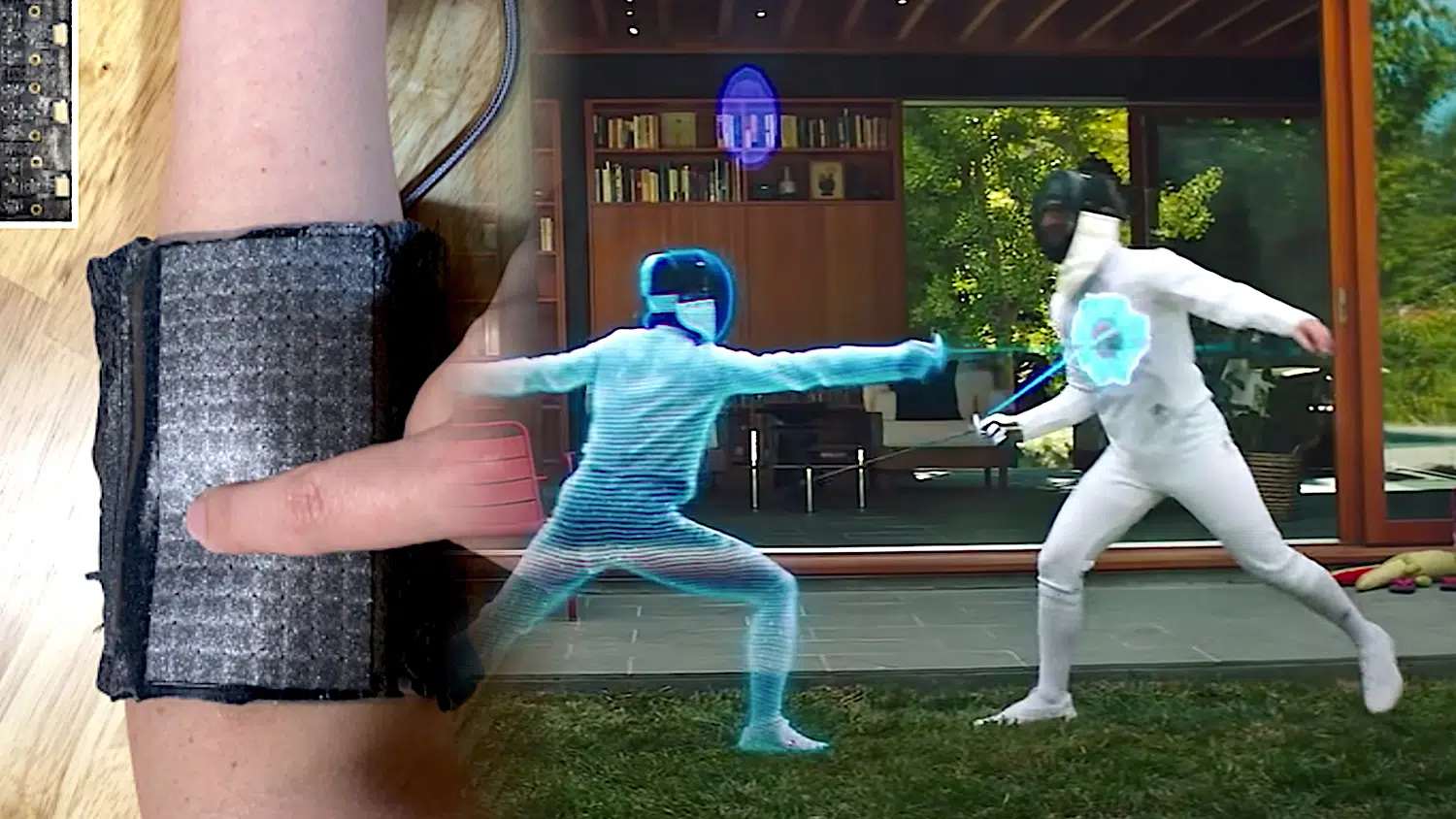
À l’heure actuelle, différents tests ont été faits par les chercheurs. Ils ont appliqué leur “peau” sur des supports plus que variés : des mains robotiques, des gants portés par un humain, des manchettes de bras, et même… des chaussures pour chien. Si tous ces essais peuvent paraître étonnants de prime abord, il s’agit en fait de récolter des données “dans la nature” auxquelles les chercheurs ont peu eu accès jusqu’ici. Dans le cas du chien, ils ont par exemple obtenu des informations sur la force et la direction exercées lorsque l’animal court, marche, se repose…
Et le métavers, dans tout ça ?
Lorsqu’on parle de sensibilité artificielle et de retour haptique, l’imaginaire d’un univers en réalité virtuelle où l’on pourrait sentir les choses « pour de vrai » n’est jamais bien loin. Y compris chez les chercheurs, d’ailleurs. Un article du New Scientist rapporte ainsi les propos de Abhinav Gupta, l’un des chercheurs du projet : « lorsque vous portez ces casques (ndlr : de réalité virtuelle), vous souhaitez générer des expériences de plus en plus riches – et la clé pour cela est l’haptique ».


Il n’est d’ailleurs sans doute pas anodin que ces recherches soient mises en avant à l’heure où l’entreprise Meta, anciennement Facebook, clame au monde sa volonté de mettre en place un véritable « métavers », une réalité virtuelle alternative.
À lire aussi : Qu’est-ce que le métavers, cet univers virtuel présenté comme « l’Internet du futur » ?
« Nous avons conçu un capteur tactile haute résolution et avons travaillé avec Carnegie Mellon pour créer une peau de robot fine. Cela nous rapproche d’objets virtuels réalistes et d’interactions physiques dans le métavers », clame d’ailleurs Marc Zuckerberg, fondateur de Facebook, dans une publication récente.
Entre la saisie délicate d’une myrtille à un univers virtuel perceptible par tous les sens, on peut tout de même supposer qu’il y a encore beaucoup de recherches. Mais les applications possibles de la ReSkin laissent tout de même songeur, puisque cette technologie permettrait à la robotique d’accéder à des tâches de manipulation beaucoup plus précises et délicates, ouvrant ainsi des portes multiples…
Vidéo de présentation de ReSkin, publiée par l’un des chercheurs :
