Un robot qui effectue avec brio une démonstration de nage papillon… Voilà qui n’est pas banal. En s’inspirant des mouvements de la raie manta, des chercheurs ont conçu un robot « souple » capable de se déplacer quatre fois plus rapidement que tout autre robot nageur conçu jusqu’à présent.
Les concepteurs de robots s’inspirent très souvent de l’ingéniosité de la nature afin de développer de nouveaux modèles. Quand il s’agit d’évoluer dans le monde sous-marin, les exemples ne manquent évidemment pas. Cette fois-ci, c’est des mouvements de l’élégante raie manta que se sont inspirés des chercheurs de la NC State University. Leurs travaux ont été publiés dans la revue Science Advances.
Les mouvements de ce robot ressemblent à ceux d’une personne qui effectuerait la nage papillon, d’où le surnom de « robot papillon ». « À ce jour, les robots mous nageurs n’ont pas été capables de nager plus vite qu’une longueur de corps par seconde, mais les animaux marins – tels que les raies mantas – sont capables de nager beaucoup plus vite et beaucoup plus efficacement », explique Jie Yin, auteur correspondant d’un article publié sur ces travaux et professeur agrégé de génie mécanique et aérospatial à NC State, dans un communiqué de l’institution. « Nous voulions nous inspirer de la biomécanique de ces animaux pour voir si nous pouvions développer des robots souples plus rapides et plus économes en énergie. Les prototypes que nous avons développés fonctionnent exceptionnellement bien ».
Les scientifiques ont développé deux versions de leur robot. L’une possède des caractéristiques basées sur la vitesse et peut nager à une vitesse de 3,74 « longueurs de corps » par seconde. L’autre est davantage conçue pour une manœuvrabilité optimale, lui permettant d’effectuer des virages serrés. Ils affirment que ces deux versions ont montré des capacités prometteuses. « Les chercheurs qui étudient l’aérodynamique et la biomécanique utilisent ce qu’on appelle un nombre de Strouhal pour évaluer l’efficacité énergétique des animaux volants et nageurs », explique Yinding Chi, premier auteur de l’article et récent Ph.D. diplômé de la NC State. « L’efficacité propulsive maximale se produit lorsqu’un animal nage ou vole avec un nombre de Strouhal compris entre 0,2 et 0,4. Nos deux robots papillons avaient un nombre de Strouhal dans cette gamme ».
Comme une « barrette pour cheveux »
Pour expliquer comment fonctionnent leurs robots, les scientifiques donnent l’exemple d’une barrette à cheveux. En effet, une barrette à cheveux est stable dans une certaine forme, jusqu’à ce qu’on applique une force dessus, suffisamment importante. Lorsqu’elle atteint le point critique, elle change de forme pour adopter une nouvelle configuration, stable elle aussi.
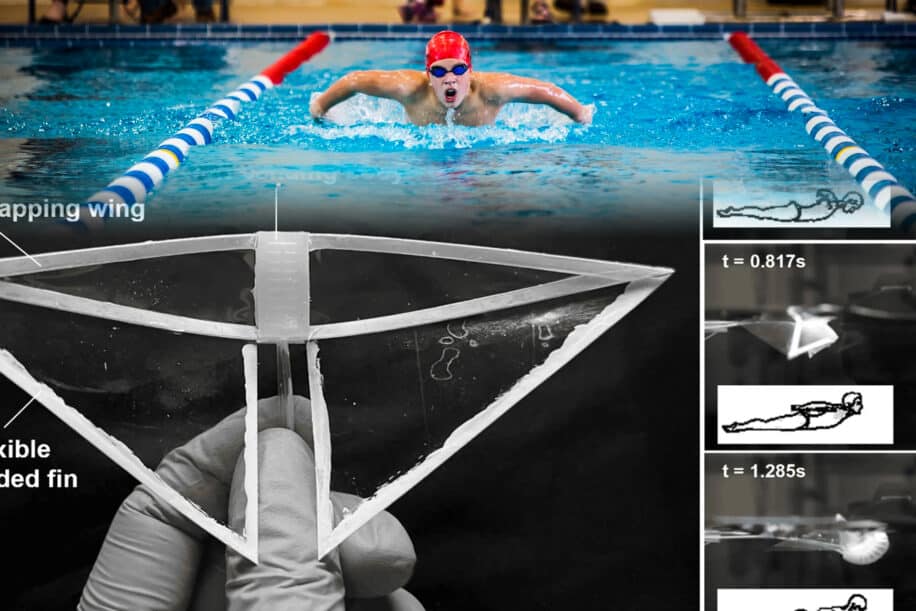
C’est un peu pareil pour ces robots : ils possèdent donc ce qu’on appelle des ailes « bistables ». Les ailes sont fixées à un corps en silicone souple. Des chambres à l’intérieur de ce corps se vident et se remplissent d’air. Au fur et à mesure que ces chambres se gonflent et se dégonflent, le corps se plie de haut en bas, forçant les ailes à claquer d’avant en arrière avec lui.
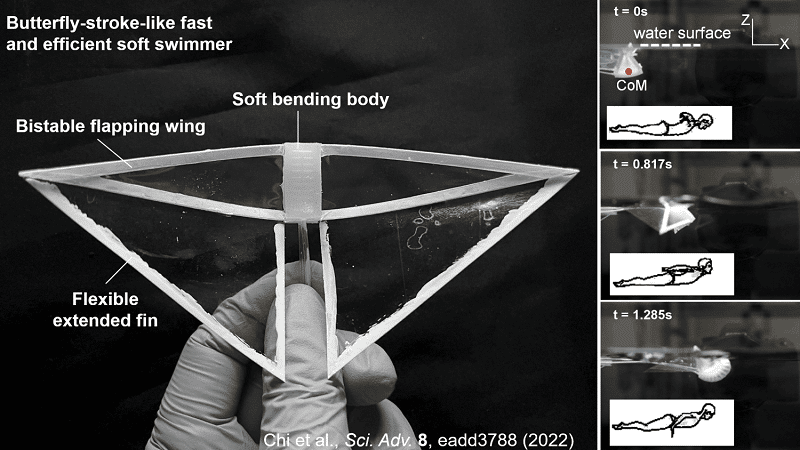
Les ailes sont donc « passives », ce qui simplifie leur conception. « La plupart des tentatives précédentes de développement de robots battants se sont concentrées sur l’utilisation de moteurs pour fournir de l’énergie directement aux ailes », explique Jie Yin. « Notre approche utilise des ailes bistables qui sont entraînées passivement en déplaçant le corps central. C’est une distinction importante, car elle permet une conception simplifiée, ce qui réduit le poids ».

Ces premiers modèles présentent toutefois quelques limitations, dont la plus évidente est le manque d’autonomie. « Les prototypes actuels sont attachés par de minces tubes que nous utilisons pour pomper de l’air dans les corps centraux. Nous travaillons actuellement au développement d’une version autonome et non attachée », précisent les scientifiques.
Vidéo de démonstration :