
En mai 2022, une équipe de chercheurs a créé un petit robot dépourvu de « squelette ». Son corps souple, visqueux, humide et collant a pour objectif de circuler dans les endroits étroits et restreints du corps humain. Mais l’autonomisation et les multifonctionnalités restaient jusqu’ici des obstacles notables pour une potentielle utilisation médicale. Plus récemment, la même équipe a dévoilé une conception inédite de robot « mou » fait de ruban adhésif et de poudre métallique, pouvant prendre diverses formes sous la direction d’un champ magnétique. Le robot peut par exemple être associé à des modules mesurant le pH. Il pourrait notamment être inséré à l’intérieur de l’estomac pour appliquer des patchs thérapeutiques sur les ulcères gastriques. Les coûts de production estimés par les chercheurs sont bas et la production en masse sera facile, ce qui ouvre la voie à une potentielle utilisation dans le médical.
Ces dernières années, des progrès considérables ont été accomplis dans le développement de systèmes robotiques souples (ou mous) à petite échelle et autonomes, capables de se transformer de manière programmable grâce aux champs magnétiques, à la lumière, à la température, aux signaux chimiques et à d’autres formes de stimulation externe.
Néanmoins, la création de robots souples sensibles aux stimuli capables d’imiter la complexité de mouvements, d’adaptations physiques et de fonctions des êtres vivants reste un défi. L’une des principales limites est de savoir comment intégrer plusieurs modules fonctionnels avec des compositions de matériaux dissemblables dans un robot souple, sans entraver son mouvement.
Alors que de nombreux exemples de matériaux sensibles aux stimuli, capables de changements de forme réversibles, de locomotion et de détection ont été développés, il existe relativement peu d’exemples d’architectures hétérogènes qui combinent ces fonctionnalités en un seul système intégré. De plus, les coûts de création empêchent de facto une utilisation potentielle à grande échelle.
Récemment, une équipe de chercheurs de l’Université de Hong Kong menée par Zhang Li a découvert qu’un robot contrôlé par un aimant peut être créé facilement et à faible coût en utilisant du ruban adhésif sur lequel de la cire non collante est imprimée selon un motif spécifique recouvert de poudre métallique. Les travaux sont publiés dans la revue Science Advances.
Un robot adhésif et aimanté
Dans cette étude, les auteurs ont créé une architecture magnétique douce, modulaire, dans laquelle des unités individuelles contenaient des microparticules NdFeB avec des profils d’aimantation spécifiques (uniformes ou non uniformes). Les unités de magnétisation modulaires sont directement intégrées dans le réseau des couches de ruban adhésif pour former des robots souples magnétiques avec des géométries 2D et 3D. Plusieurs modules fonctionnels avec différentes propriétés matérielles (particules, papier, films, mousses et composants électroniques) peuvent être intégrés facilement grâce à une adhérence robuste pour former des réseaux connectés.
Il faut savoir que les particules NdFeB sont des particules d’aimant au néodyme (aimant NdFeB). Il s’agit d’un aimant permanent puissant, composé d’un alliage de néodyme, de fer et de bore.
Concrètement, sur un ruban adhésif est imprimée une cire non collante selon un motif spécifique (magnétisation uniforme ou non uniforme). Puis une poudre contenant les microparticules NdFeB magnétiques est appliquée sur la bande, qui adhère aux sections exposées, mais pas à la couche de cire — comme un pochoir. Ensuite, le ruban est trempé dans une solution d’acétate d’éthyle pendant 5 min pour retirer le masque de cire. En raison du gonflement de la couche adhésive, le motif de cire à la surface du ruban peut être facilement retiré. Enfin, les robots souples magnétiques sont découpés dans l’adhésif double face, puis alimentés par un champ magnétique.

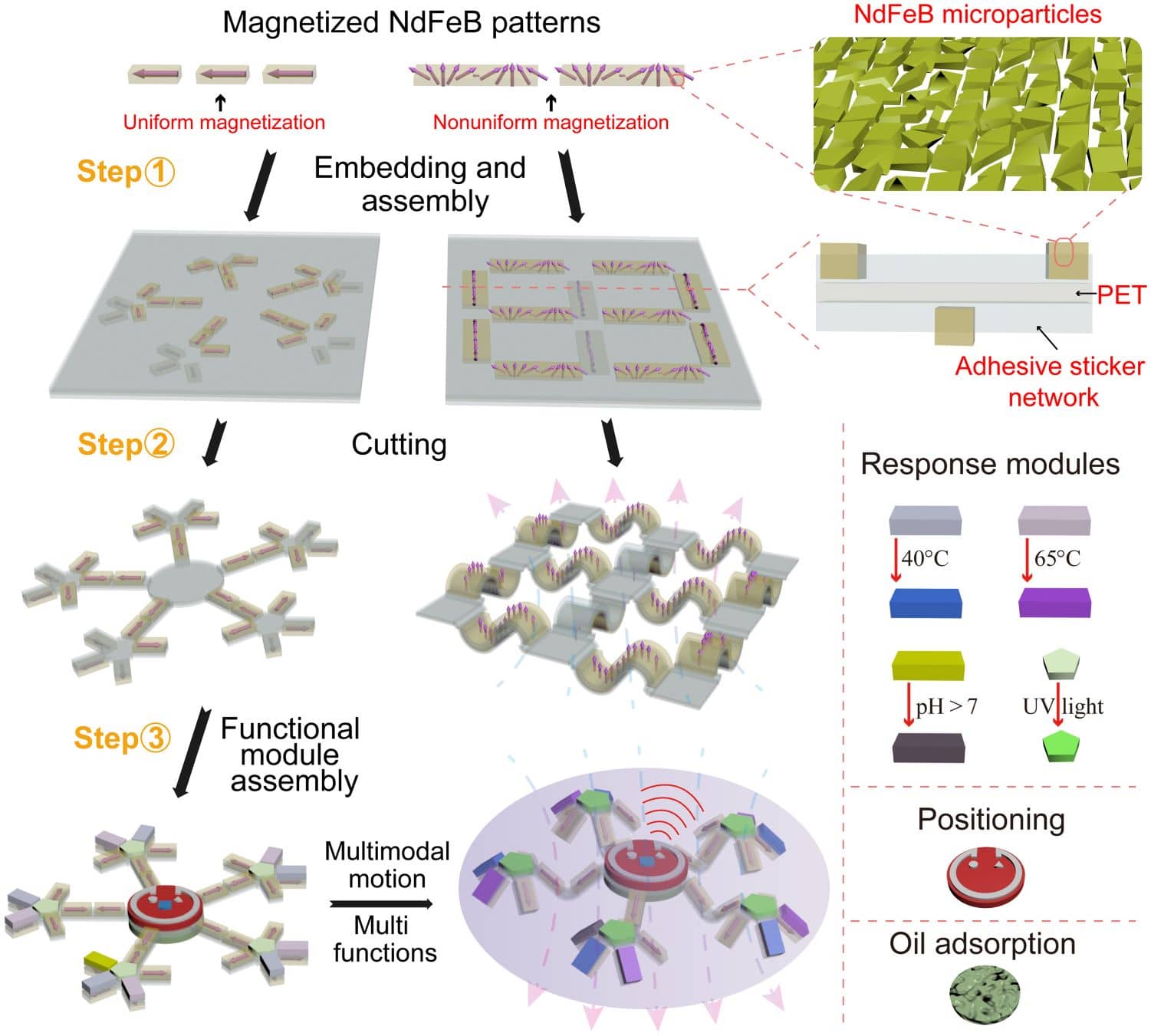 Principe de fabrication des robots souples magnétiques, avec les différents modules possibles en bas à droite. © Zhang Li et al., 2022
Principe de fabrication des robots souples magnétiques, avec les différents modules possibles en bas à droite. © Zhang Li et al., 2022L’équipe de recherche a testé différentes configurations de robots d’environ un centimètre de diamètre, aux formes variées. Ils changent de géométrie en fonction de la présence et de l’orientation d’un champ magnétique. Certains des robots ont pu se déplacer dans l’eau ou le long de surfaces planes.



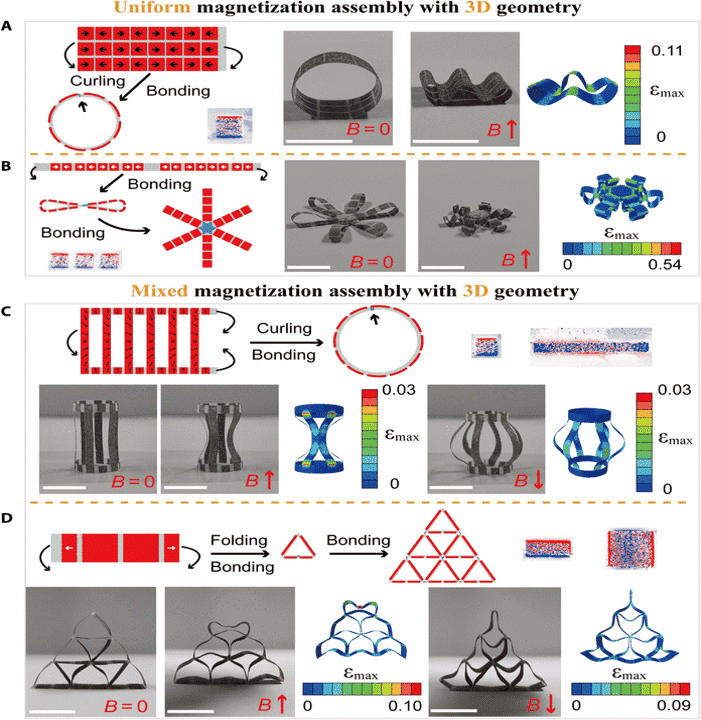 Différentes formes des robots souples magnétiques. © Zhang Li et al., 2022
Différentes formes des robots souples magnétiques. © Zhang Li et al., 2022Des possibilités médicales surprenantes
Pour intégrer une « intelligence » supplémentaire à ces robots souples, certaines régions sans particules magnétiques sont sélectivement réservées à l’introduction d’une large gamme de composants électroniques et de systèmes sans fil à hautes performances. Ces modules fonctionnels comprennent LED infrarouges au silicium, transistors semi-conducteurs à oxyde métallique complémentaires, capteurs UV, capteurs de température et micro-supercondensateurs, ainsi que des bobines réceptrices d’énergie, des bobines d’inductance, des systèmes de communication en champ proche, etc.
D’ailleurs, lors de leurs expérimentations, les auteurs ont réussi à faire se déplacer, en rampant, un robot souple sur la surface du tissu de l’estomac d’un porc. Ce robot a même pu placer un petit patch thérapeutique sur un ulcère gastrique avant de se détacher du patch et de s’éloigner.
Ce type de robots pourrait être utilisé pour administrer des médicaments ou effectuer des procédures médicales simples dans l’estomac ou les intestins. Ils se déplacent en forme réduite jusqu’à destination puis se déplient. Sans compter que leur fabrication est réduite en coûts et en temps, ils pourraient être imprimés à l’image des presses de journaux.

 Fabrication sous presse des robots souples. © Zhang Li et al., 2022
Fabrication sous presse des robots souples. © Zhang Li et al., 2022Néanmoins, les auteurs précisent que lorsque plusieurs robots identiques se trouvent dans le même champ magnétique, il n’est pas possible de faire fonctionner individuellement plus d’un robot à la fois. Cependant, des robots souples avec des profils et des géométries de magnétisation différents, comme étudiés dans cet article, peuvent présenter des déformations et des comportements de mouvements locaux différents en réponse au même champ magnétique. Des recherches supplémentaires sont nécessaires pour affiner ces modèles et permettre leur application effective dans le domaine médical, mais aussi dans le domaine de l’informatique (pour réparer un ordinateur sans avoir à l’ouvrir par exemple).