
Des chercheurs ont développé ce qui seraient les plus petits robots autonomes et entièrement programmables jamais conçus. À peine plus grands qu’un grain de sel, ils sont contrôlés à l’aide de la lumière grâce à de minuscules panneaux solaires et disposent d’un micro-ordinateur intégré leur permettant de percevoir et de réagir à leur environnement de manière indépendante. Cette technologie ouvre des perspectives d’application, de la biomédecine à l’industrie manufacturière.
Dans la nature, les micro-organismes constituent des systèmes intelligents entièrement autonomes, capables d’agir à des échelles microscopiques. Depuis des décennies, les ingénieurs cherchent à reproduire des microrobots dotés d’une autonomie et d’une intelligence comparables.
Ces microrobots devraient ainsi réunir toutes les caractéristiques qui distinguent leurs homologues macroscopiques des autres machines : ils doivent être capables de percevoir leur environnement, de traiter des informations et exécuter des actions, de supporter une programmation répétitive et de manipuler ou d’explorer leur milieu.
Miniaturiser les robots tout en conservant ces capacités demeure toutefois un défi considérable. À l’heure actuelle, les plus petits robots dotés de systèmes intelligents de perception et de traitement de leur environnement mesurent environ un millimètre. Atteindre des dimensions encore inférieures se heurte aux lois de la physique régissant les circuits semi-conducteurs, les systèmes de stockage de l’énergie et la propulsion à l’échelle microscopique. Ces contraintes doivent être repensées à mesure que la taille des robots diminue.
Alors que l’électronique n’a cessé de se miniaturiser au cours des dernières décennies, la robotique peine à suivre la même trajectoire. « Concevoir des robots capables de fonctionner de manière autonome à des dimensions inférieures au millimètre est extrêmement difficile. Le domaine est bloqué sur ce problème depuis quarante ans », explique Marc Miskin, professeur adjoint de génie électrique et des systèmes à Penn Engineering (Université de Pennsylvanie).
En effet, à notre échelle, les forces physiques — telles que la gravité ou l’inertie — dépendent du volume. À l’échelle des cellules, en revanche, ces forces dépendent d’autres paramètres, comme la viscosité. « À une échelle suffisamment petite, pousser sur l’eau revient à pousser dans du goudron », illustre Marc Miskin.
Marc Miskin et ses collègues de l’Université du Michigan proposent précisément une nouvelle méthode permettant à des microrobots de se déplacer de manière entièrement autonome à l’échelle cellulaire. « Nous avons réduit la taille des robots autonomes à un niveau inédit », explique le chercheur. « Cela ouvre une nouvelle échelle pour les robots programmables », ajoute-t-il. Ces travaux ont fait l’objet de deux publications distinctes dans les revues PNAS et Science Robotics.

 Taille d’un microrobot par rapport à un doigt humain. © Marc Miskin, Université de Pennsylvanie
Taille d’un microrobot par rapport à un doigt humain. © Marc Miskin, Université de PennsylvanieSe déplacer sans lutter contre le milieu
Mesurant environ 200 × 300 × 50 micromètres, les microrobots mis au point par l’équipe de Marc Miskin reposent sur un système de propulsion original. Plutôt que de tenter de s’opposer aux forces physiques dominantes à l’échelle microscopique — comme nager à contre-courant —, ils les exploitent. Alors que les animaux, tels que les poissons, se déplacent en repoussant l’eau derrière eux pour avancer, ces robots ne cherchent pas à exercer une force opposée par des mouvements mécaniques.
Pour se déplacer, ils génèrent un champ électrique qui met en agitation les ions de la solution environnante. Ces ions repoussent à leur tour les molécules voisines, entraînant le substrat autour du corps du robot. « C’est comme si le robot était dans une rivière en mouvement, mais qu’il faisait lui-même bouger la rivière », explique Marc Miskin.
Les microrobots peuvent ainsi effectuer des trajectoires complexes ou se déplacer de manière groupée et coordonnée en ajustant les champs électriques. Selon les chercheurs, ils atteignent des vitesses allant jusqu’à une longueur de corps par seconde. Et comme les électrodes générant ces champs électriques ne sont composées d’aucune pièce mobile, les robots se révèlent particulièrement robustes et peuvent être déplacés d’un milieu à un autre à l’aide d’une simple pipette.
Pour être réellement autonomes et capables de prendre des décisions de manière indépendante, ces microrobots doivent embarquer un ordinateur, des composants électroniques destinés à percevoir leur environnement et à contrôler leur propulsion, ainsi que de minuscules panneaux solaires permettant d’alimenter l’ensemble par la lumière. Le tout doit tenir sur une surface de quelques micromètres.


« Le principal défi pour l’électronique réside dans le fait que les panneaux solaires sont extrêmement petits et ne produisent que 75 nanowatts de puissance. Cela représente plus de 100 000 fois moins d’énergie qu’une montre connectée », explique David Blaauw, chercheur au département de génie électrique et d’informatique de l’Université du Michigan et coauteur des études.

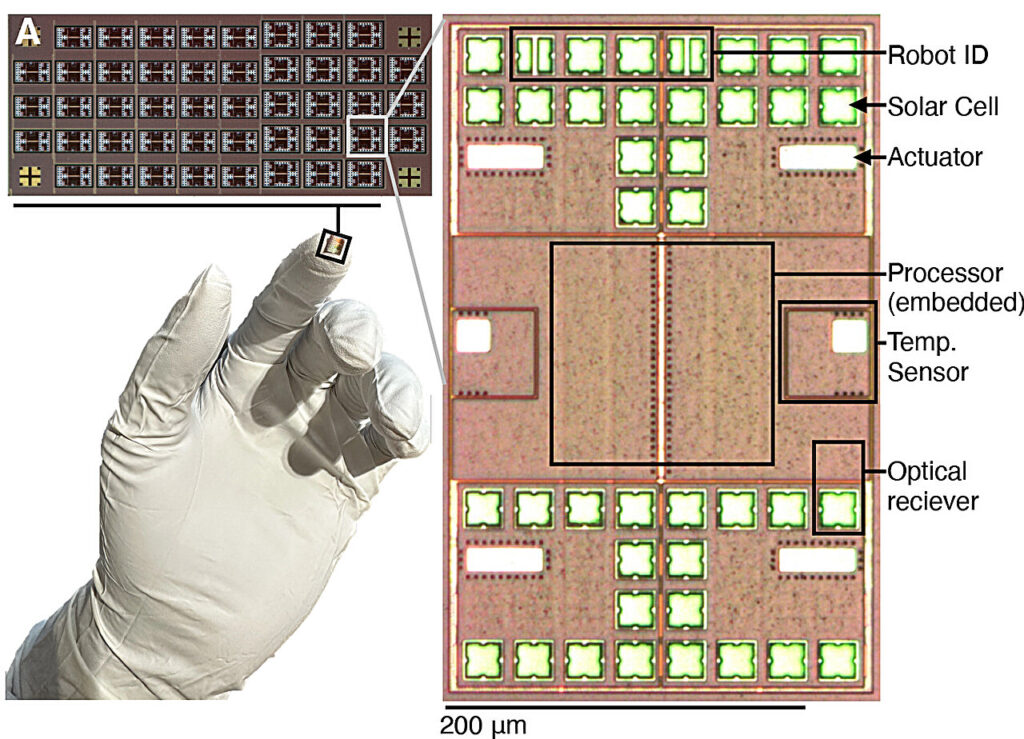 Le robot est doté d’un ordinateur de bord complet, lui permettant de recevoir et d’exécuter des instructions de manière autonome. © Laboratoire Miskin, Penn Engineering ; Laboratoire Blaauw, Université du Michigan
Le robot est doté d’un ordinateur de bord complet, lui permettant de recevoir et d’exécuter des instructions de manière autonome. © Laboratoire Miskin, Penn Engineering ; Laboratoire Blaauw, Université du MichiganPour rendre possible le fonctionnement de l’ordinateur avec une énergie aussi limitée, l’équipe a conçu des circuits spécifiques opérant à des tensions très basses, réduisant de plus de mille fois la consommation énergétique. Les chercheurs sont également parvenus à intégrer le processeur et la mémoire nécessaires au stockage du programme dans un espace très restreint, la majeure partie de la surface étant occupée par les panneaux solaires.
« Nous avons dû repenser entièrement les instructions du programme informatique, en condensant ce qui nécessitait habituellement de nombreuses commandes pour le contrôle de la propulsion en une seule instruction spéciale, afin de réduire la taille du programme et de l’adapter à la minuscule mémoire du robot », précise David Blaauw.
Par ailleurs, au-delà de l’alimentation, les impulsions lumineuses servent également à programmer les microrobots. Chaque robot possède une empreinte spécifique permettant de charger différents programmes à la demande. Selon les chercheurs, des versions améliorées pourraient embarquer des logiciels plus complexes et se déplacer plus rapidement dans des environnements plus contraignants, le tout à moindre coût. Les prototypes actuels ne coûteraient qu’un centime de dollar pièce à produire.