
Autoréparable, étanche, suffisamment élastique pour s’adapter à des mouvements complexes… Les robots humanoïdes de demain seront peut-être pourvus d’une peau aux performances similaires à celle des humains. C’est en tout cas ce qu’espère une équipe de chercheurs de l’Université de Tokyo, qui a mis au point une « peau » spécialement conçue pour ressembler à la nôtre.
« Les humanoïdes sont des robots créés avec des formes ou des caractéristiques humaines. Ils ont également le potentiel d’interagir de manière transparente avec les êtres humains. En reproduisant les apparences et les fonctions des êtres humains, les humanoïdes ont le potentiel d’établir des interactions homme-robot plus harmonieuses et naturelles », résument ainsi les scientifiques dans leurs travaux de recherche. Ces derniers ont été publiés dans la revue Matter. C’est sur la question particulière de la peau que les chercheurs se sont penchés, en créant une « peau artificielle » vivante.
En effet, les habituels revêtements en silicone leur paraissaient insuffisants. « Bien que le caoutchouc de silicone, qui a été traditionnellement utilisé comme matériau de revêtement pour les humanoïdes, ait acquis au fil des améliorations techniques une apparence humaine, il manque de nombreuses fonctions que l’on retrouve uniquement chez une peau vivante, telles que la régénération ». C’est donc directement à partir de cellules vivantes, cultivées en laboratoire, que les scientifiques se sont cette fois-ci basés. « Les équivalents de peau sont des tissus in vitro fabriqués à l’aide de cellules vivantes (fibroblastes, kératinocytes, etc.) et d’hydrogels de matrice extracellulaire (ECM) (collagène, etc.), qui peuvent imiter les caractéristiques uniques de la peau, telles que l’apparence et la structure interne ».
La « peau » ainsi créée par les chercheurs a non seulement un toucher réaliste, mais elle est également étanche et capable de « guérir » un peu à la façon d’une peau humaine. Pour tester cette capacité, les chercheurs ont entaillé une parcelle de peau à l’aide d’un scalpel. Ils ont ensuite appliqué une feuille de collagène sur la blessure, qui s’est progressivement fondu avec la structure de base, « guérissant » ainsi l’entaille.

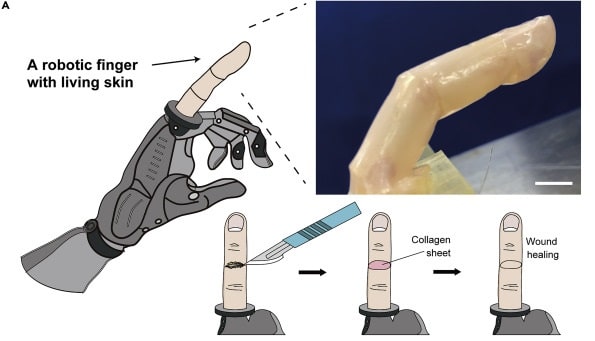 Illustration conceptuelle d’une main robotique biohybride avec son doigt recouvert d’un équivalent de peau humaine. © Shoji Takeuchi et al.
Illustration conceptuelle d’une main robotique biohybride avec son doigt recouvert d’un équivalent de peau humaine. © Shoji Takeuchi et al.Ce type de fabrication est d’ailleurs déjà utilisé dans le domaine médical, pour le traitement de brûlures sévères, ou encore dans la recherche biologique. Là où le travail de ces chercheurs innove, c’est en revanche dans l’application à la robotique, et surtout au moulage d’une telle peau sur des formes complexes et mobiles. Ils ont ainsi effectué leurs tests sur un doigt robotique à trois articulations. « Il est difficile de fabriquer des équivalents de peau capables de couvrir de manière transparente les surfaces tridimensionnelles (3D), courbes et inégalités des humanoïdes. La plupart des équivalents de peau ont été dérivés sous la forme d’une feuille plate bidimensionnelle en raison de l’incapacité de contrôler la forme 3D de l’équivalent de derme, qui rétrécit et change radicalement de forme pendant la culture, et de la difficulté à ensemencer uniformément des kératinocytes sur un derme équivalent avec des surfaces 3D », soulignent les scientifiques.
Une peau qui « pousse » directement sur la structure
Ils sont pourtant parvenus à parfaitement envelopper de peau la forme du doigt robotique, en la « moulant » directement autour. Dans un premier temps, ils ont donc directement immergé le doigt dans une solution de collagène et de fibroblastes dermiques (les cellules qui produisent les protéines formant la matrice structurelle de notre peau). Un « ancrage » à la base du doigt a permis de contrôler le rétrécissement de la matière lors de la culture, de façon à ce que cet équivalent de derme vienne parfaitement adhérer à la structure. Ensuite, un équivalent de l’épiderme a été créé par-dessus ce derme, en faisant un « ensemencement » de kératinocytes épidermiques humains directement dessus. Un tissu cellulaire a ainsi pu se développer correctement. « Étant donné que l’épiderme in vivo est principalement constitué de kératinocytes qui forment des jonctions cellule-cellule serrées, la couche épidermique est généralement formée en ensemençant des suspensions de kératinocytes à la surface d’un équivalent de derme de forme plane, permettant aux suspensions de se déposer et d’adhérer au derme, afin d’obtenir un épiderme hautement cellularisé », expliquent les chercheurs.


Ils ont donc obtenu un doigt robotique pourvu d’une peau flexible, douce au toucher, autoréparante et étanche. Un obstacle de taille reste toutefois à surmonter : cette « peau » ne survit que peu de temps hors de son bain de culture, puisqu’elle ne peut pas être irriguée comme la nôtre. L’un des défis que notent donc désormais les scientifiques est de mettre au point la structure nécessaire pour « alimenter » la peau. « La construction de canaux de perfusion à l’intérieur et sous le derme équivaut à imiter les vaisseaux sanguins pour fournir de l’eau. Ceici, ainsi que l’intégration des glandes sudoripares dans l’équivalent de la peau, sont des orientations importantes pour les recherches futures », affirment-ils.