Des ingénieurs chinois ont développé des robots magnétiques souples inspirés d’araignées, capables de réaliser avec précision des interventions gastro-intestinales mini-invasives. Leur conception permettrait de se déplacer plus facilement à l’intérieur du tube digestif, y compris sur des surfaces abruptes et à l’envers, grâce à un contrôle externe par champ magnétique, tout en améliorant le confort des patients.
Les maladies affectant le tube digestif, telles que le cancer, représentent un enjeu important de santé publique au cours des dernières décennies. D’après l’OMS, les cancers du tractus gastro-intestinal figurent parmi les plus fréquents dans le monde, ceux du côlon et de l’estomac se classant parmi les cinq premiers en termes d’incidence et de mortalité. De récentes études font également état d’une hausse notable du cancer colorectal chez les jeunes adultes.
Faute d’alternatives thérapeutiques réellement efficaces, le diagnostic et les interventions précoces constituent aujourd’hui une priorité majeure de la recherche biomédicale. L’endoscopie reste la principale stratégie : elle permet d’observer en temps réel l’état du tube digestif et d’en explorer de longues sections.
Mais cette technique demeure invasive et souvent inconfortable pour les patients. Elle implique l’introduction d’un tube flexible muni d’une caméra à son extrémité, inséré par la bouche, l’anus ou via une petite incision. De plus, elle peine souvent à atteindre les zones profondes du tractus, en raison des voies courbes et irrégulières qui entravent sa progression.
Des robots bio-inspirés pour surmonter les limites de l’endoscopie
Depuis plusieurs années, les mini-robots souples et autonomes font l’objet de recherches pour pallier ces limites. Leur flexibilité et la possibilité de les contrôler à distance grâce à des stimuli, tels que des champs magnétiques, pourraient leur permettre d’accéder à des régions du tractus gastro-intestinal inaccessibles aux endoscopes classiques, tout en réduisant l’inconfort des patients.
Cependant, le développement de robots souples pour l’endoscopie se heurte à de sérieux obstacles. Leur déplacement varie selon la région du tractus où ils se trouvent, en raison des différences physiologiques et structurelles propres à chaque organe.
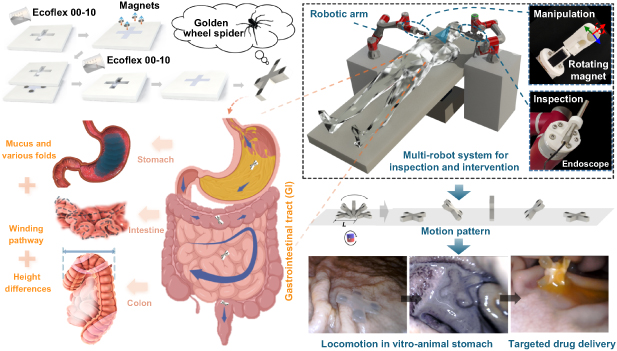
Par exemple, la paroi interne de l’estomac est tapissée de mucus et parcourue de plis, ce qui impose aux robots une forte capacité de propulsion et d’adaptation aux obstacles. Le côlon, bien que plus large et moins sinueux que l’intestin grêle, présente des variations de hauteur qui compliquent également la progression.
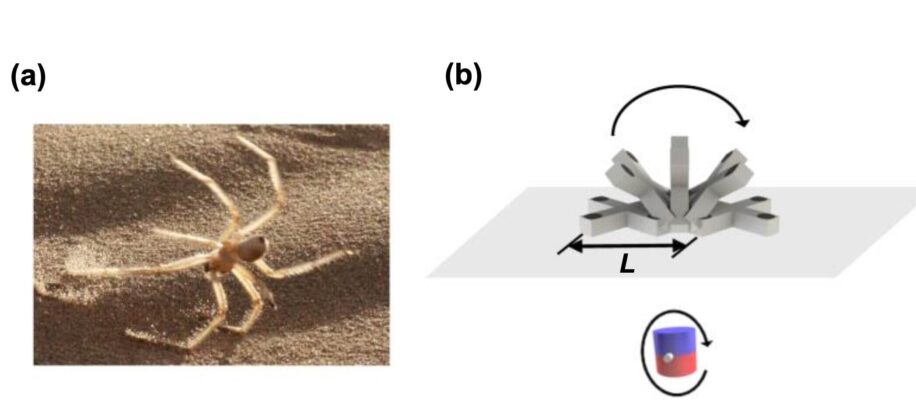
Pour relever ces défis, une équipe de chercheurs de l’Université de Macao propose de nouveaux robots magnétiques souples capables de se déplacer dans des environnements complexes sous tous les angles, y compris à l’envers. Leurs mouvements s’inspirent de l’araignée « roue d’or » (Carparachne aureoflava), connue pour sa capacité à rouler sur le sable et les terrains accidentés.
« Les techniques endoscopiques traditionnelles sont souvent source d’inconfort pour les patients, et il est difficile de naviguer dans les zones profondes des structures organiques complexes. Ces travaux proposent un robot magnétique souple bio-inspiré (BMSR) pour relever ces défis », écrivent les chercheurs dans leur étude publiée dans l’International Journal of Extreme Manufacturing.
Des déplacements à n’importe quel angle
Ces nouveaux robots sont conçus à partir de matériaux souples et malléables, réduisant ainsi le risque de lésions des tissus internes tout en offrant un meilleur confort aux patients. Ils sont manipulés par deux bras robotisés disposant chacun de six degrés de liberté : l’un commande en temps réel les mouvements, l’autre assure la surveillance de leur état.
Le bras de contrôle utilise un aimant générant un champ magnétique rotatif, induisant des mouvements de rotation aux robots. « La locomotion roulante des BMSR leur permet de naviguer aisément dans les plis de l’estomac, les passages sinueux de l’intestin grêle et les parois abruptes du côlon », soulignent les auteurs.
Ce contrôle magnétique permet de produire une force de propulsion suffisante pour progresser sur des surfaces inclinées à n’importe quel angle. Les robots pourraient franchir des obstacles allant jusqu’à 8 centimètres de hauteur et évoluer dans des environnements recouverts de mucus.
Ils sont également équipés d’un endoscope visuel, qui facilite leur orientation vers les zones cibles. « Les BMSR peuvent alors effectuer des fonctions telles que l’administration ciblée de médicaments », précisent les chercheurs. Cette approche pourrait constituer une alternative potentiellement moins invasive pour le traitement de certains cancers gastro-intestinaux.
Pour évaluer leurs performances, les chercheurs ont testé les robots dans des segments de tube digestif d’animaux décédés, présentant des caractéristiques proches de celles des organes humains. Les résultats montrent que les robots ont atteint les zones ciblées sans endommager les tissus environnants. La prochaine étape consistera à mener des essais sur des animaux vivants, avant d’envisager des tests cliniques.