Des chercheurs de l’Université de Bologne ont mis au point un système entièrement automatisé pour faire la lessive. Ce robot est capable d’insérer le linge dans le tambour, d’interpréter l’interface utilisateur du lave-linge et de régler le cycle de lavage adéquat. Il est également capable de sortir le linge de la machine à l’issue du programme. Il n’est malheureusement pas prévu pour les particuliers, mais pour les fabricants désireux d’accélérer les tests et l’évaluation de leurs nouveaux produits.
C’est sans doute le rêve de beaucoup de foyers : disposer d’un robot capable de faire la lessive tout seul, de A à Z. Un robot qui récupère le linge sale, le dépose dans la machine et lance le programme de lavage. Ce rêve, des ingénieurs italiens l’ont concrétisé, en partenariat avec la société Electrolux. Ils présentent dans l’ouvrage Human-Friendly Robotics 2021, leur nouveau système de « manipulation robotisée du linge avec interprétation de l’interface utilisateur du lave-linge ».
Ce robot pourrait faire le bonheur de millions de personnes — comme n’importe quel système autonome capable d’effectuer toute autre tâche ménagère — mais l’intérêt des industriels du secteur est double : « Le déploiement de systèmes robotisés pourrait potentiellement leur permettre de gagner du temps et de l’argent, en faisant fonctionner les tests et la validation 24 heures sur 24 et 7 jours sur 7 avec une intervention humaine minimale, voire nulle », a déclaré à TechXplore Gianluca Palli, l’un des concepteurs du système.
Automatiser les opérations de blanchisserie
L’objectif de Palli et ses collaborateurs est aussi de développer un système capable de remplacer les opérateurs humains dans les services de nettoyage (pressings et blanchisseries) par des bras robotiques complètement autonomes. Le laboratoire d’automatisation et de robotique de l’Université de Bologne a mené des recherches approfondies sur la manipulation robotique. Ces dernières années, les chercheurs se sont intéressés en particulier à la manipulation d’objets déformables complexes (tels que des vêtements), qui s’avère beaucoup plus difficile qu’il n’y paraît — les robots ont généralement du mal à manipuler ce type d’objets mous.
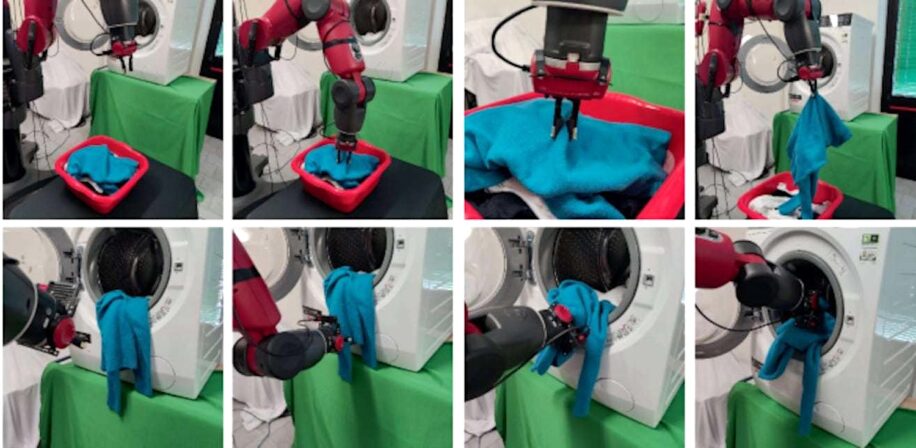
Concevoir un robot capable de faire la lessive signifie qu’il doit être capable d’accomplir toutes les étapes de cette tâche, à savoir : détecter les vêtements à laver, les récupérer, les insérer dans le lave-linge, interpréter les informations affichées sur l’interface utilisateur, puis régler les paramètres de lavage adéquats. L’une des difficultés réside notamment dans le fait que certains grands vêtements pourraient potentiellement rester partiellement hors du tambour au moment de l’insertion ; le robot doit donc être capable de détecter cela et d’y remédier.
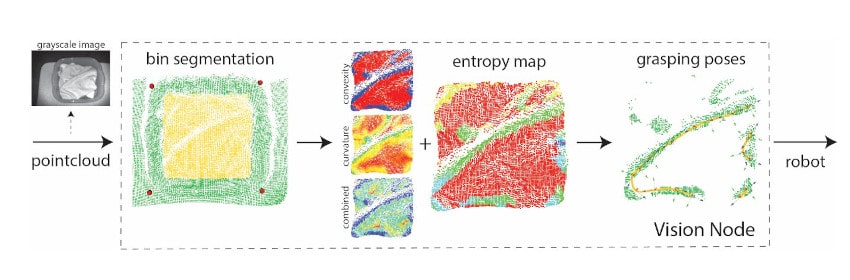
Pour améliorer la capacité du robot à manipuler les vêtements, l’équipe a développé un algorithme de perception basé sur les nuages de points. Cet algorithme peut détecter les plis sur une surface en tissu, calculer des courbes splines (fréquemment utilisées pour représenter numériquement des contours complexes) le long de la surface plissée, puis déterminer la meilleure façon de saisir l’objet. Le nuage de points est capturé en direct par une caméra TOF (Time of Flight), capable de mesurer en temps réel une scène en 3D en émettant des flashs lumineux de la gamme des infrarouges.
De l’apprentissage profond pour interpréter les commandes
Mais le robot doit également pouvoir se débrouiller avec un vêtement ne comportant pas (ou peu) de plis. Pour ce cas précis, les chercheurs ont mis en œuvre une approche de « détection de blobs » — une méthode qui permet de détecter certaines régions par leurs propriétés optiques, telles que la luminosité ou la couleur, par rapport aux régions environnantes. Le robot peut ainsi détecter tout ce qui « dépasse » de la machine et le saisir en plein milieu pour le repousser dans le tambour. Cette approche a en outre été combinée à un système de classement des différentes possibilités de préhension, capable d’identifier la plus efficace.
Une fois le linge correctement inséré dans la machine, reste à lancer le bon programme de lavage. Pour ce faire, l’équipe a développé un algorithme de détection et d’interprétation de l’interface utilisateur (à affichage numérique), basé sur l’apprentissage profond.

Les chercheurs ont pu évaluer l’efficacité de leur système autonome dans une série de tests. Ces derniers impliquaient deux plateformes robotiques développées précédemment, à savoir les robots Tiago et Baxter, ainsi qu’une machine à laver conçue par AEG. « C’est la première fois que le problème du fonctionnement d’un cycle de lavage entièrement robotisé a été étudié dans tous ses aspects », souligne Palli. Les premiers résultats sont prometteurs, mais l’équipe prévoit d’améliorer encore les capacités de manipulation d’objets textiles.
« La première ligne d’extension consiste à évaluer les réseaux neuronaux profonds pour la tâche de détection de la saisie optimale basée sur l’identification des plis », précise Palli. Ceci permettra de généraliser davantage les algorithmes de vision développés par l’équipe. Lorsqu’il sera un peu plus mature, ce système de blanchisserie automatisé pourrait également être mis en œuvre et testé dans des environnements réels, afin d’évaluer ses performances — l’objectif étant de quantifier les avantages économiques (ou autres) de ce système robotique pour les industriels. Les chercheurs prévoient également de développer des systèmes similaires pour d’autres appareils électroménagers, tels que les lave-vaisselle.