Le rover Perseverance de la NASA a effectué son premier déplacement entièrement planifié par IA, a annoncé l’agence. Il a parcouru près de 456 mètres au cours d’un test de deux jours en reliant plusieurs points de passage planifiés par un modèle d’IA d’Anthropic, une tâche de prise de décision complexe et chronophage habituellement effectuée par des planificateurs humains. L’essai marque une étape importante vers l’intégration des technologies d’automatisation aux missions spatiales.
Lancé le 30 juillet 2020, le rover Perseverance parcourt et étudie la surface de Mars depuis plus de cinq ans après avoir atterri dans le cratère Jezero le 18 février 2021. Faisant à peu près la taille d’une voiture et pesant plus d’une tonne, il a pour mission d’identifier des sites qui auraient pu potentiellement abriter la vie. Il s’est stratégiquement posé au niveau de ce cratère, qui aurait abrité un lac permanent et plusieurs deltas de rivière il y a environ 3,6 milliards d’années, et conserve peut-être des traces d’anciennes formes de vie.
La distance Terre-Mars (environ 225 millions de kilomètres en moyenne) engendre cependant un important délai de communication, rendant impossible la transmission de données et le pilotage du rover à distance en temps réel. Ses itinéraires doivent donc être planifiés et testés à l’avance par les opérateurs de la NASA.
Les planificateurs analysent le terrain et les données de relief pour tracer des itinéraires à l’aide de points de passage, des coordonnées fixes à la surface du sol généralement espacées de 100 mètres et que le rover doit relier successivement afin d’éviter tout dommage potentiel. Ils transmettent ensuite ces plans au rover à l’aide du réseau de communication avec l’espace lointain de la NASA, pour qu’il les exécute.
Ce processus de planification d’itinéraire est particulièrement complexe et chronophage et nécessite l’intervention d’experts hautement qualifiés. La NASA propose d’utiliser l’IA générative pour optimiser le processus et alléger le travail de ses opérateurs. « Les éléments fondamentaux de l’IA générative sont prometteurs pour optimiser les piliers de la navigation autonome lors des déplacements hors de notre planète : la perception (détection des rochers et des ondulations), la localisation (connaissance de notre position) et la planification et le contrôle (choix et exécution du chemin le plus sûr) », explique dans un communiqué Vandi Verma, roboticienne spatiale au Jet Propulsion Laboratory et membre de l’équipe d’ingénierie de Perseverance.
« Nous nous dirigeons vers un avenir où l’IA générative et d’autres outils intelligents aideront nos rovers de surface à effectuer des déplacements sur des kilomètres tout en minimisant la charge de travail des opérateurs, et à identifier les caractéristiques intéressantes de la surface pour notre équipe scientifique grâce à l’analyse d’importants volumes d’images prises par les rovers », ajoute-t-elle.
Un parcours de 456 mètres en deux jours
Les équipes de la NASA ont collaboré avec Anthropic pour utiliser une version de Claude appelée modèle vision-langage qui analyse les données de surface existantes. Ces données comprennent des images orbitales à haute résolution capturées par la caméra High Resolution Imaging Science Experiment (HiRISE) de la sonde Mars Reconnaissance Orbiter.
Après avoir identifié les caractéristiques critiques du terrain (reliefs rocheux, affleurements, champs de blocs dangereux, rides de sable, etc.), le modèle a généré une trajectoire continue jalonnée de points de passage. Afin de s’assurer que ses instructions sont compatibles avec le logiciel du rover, les experts ont préalablement testé les commandes sur une réplique virtuelle. Ils ont testé plus de 500 000 variables de télémétrie avant d’envoyer les commandes à Perseverance.
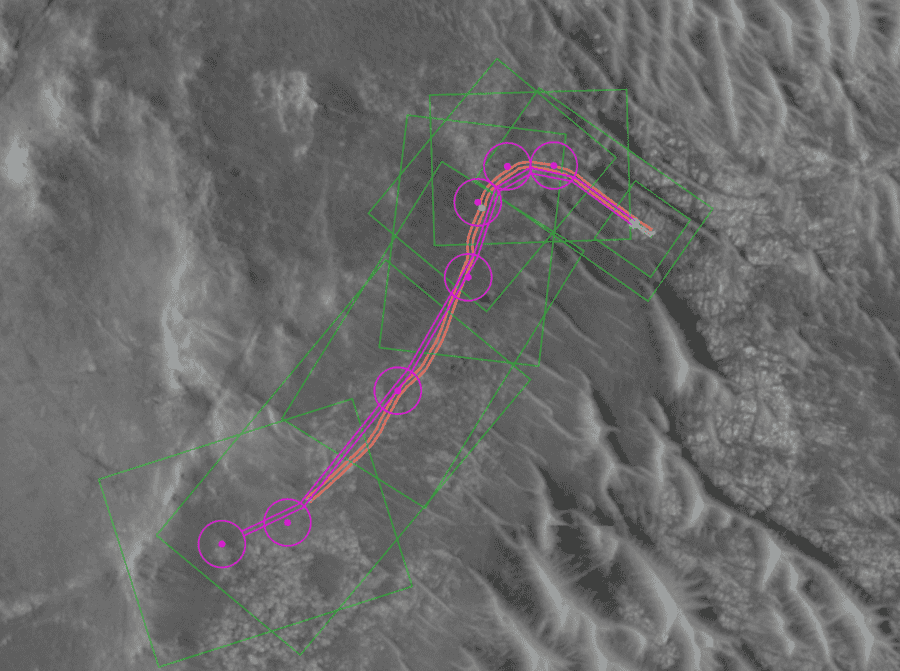
Le modèle a été utilisé pour les 1 707e et 1 709e jours martiens de la mission, notamment les 8 et 10 décembre 2025. Le premier jour, Perseverance a parcouru 210 mètres en reliant un par un les points de passage planifiés par l’IA et 246 mètres le deuxième jour, le tout sans aucune intervention humaine.
Animation créée avec l’outil de visualisation Caspian à partir de données acquises lors d’un déplacement de 246 mètres (807 pieds) sur le rebord du cratère Jezero, effectué par le rover le 10 décembre 2025, soit le 1709e jour martien (sol) de la mission:
« Cette démonstration illustre les avancées notables réalisées en matière de capacités et ouvre de nouvelles perspectives pour l’exploration d’autres mondes », a déclaré Jared Isaacman, le nouvel administrateur de la NASA, dans le communiqué. « Des technologies autonomes comme celle-ci peuvent permettre aux missions d’être plus efficaces, de s’adapter aux terrains difficiles et d’accroître les résultats scientifiques à mesure que l’éloignement de la Terre augmente. C’est un exemple d’équipes appliquant de nouvelles technologies avec rigueur et responsabilité dans des opérations réelles. »
D’après les responsables, ce type de systèmes intelligents et autonomes pourrait aussi, à terme, être utilisé pour d’autres systèmes embarqués des rovers, tels que les drones et les autres dispositifs de surface. « C’est une technologie déterminante pour établir l’infrastructure et les systèmes nécessaires à une présence humaine permanente sur la Lune et pour emmener les États-Unis sur Mars et au-delà », conclut Matt Wallace, directeur du Bureau des systèmes d’exploration du JPL.
Vidéo montrant le point de vue de Perseverance lors de son déplacement de 246 mètres (807 pieds) le long du rebord du cratère Jezero, le 10 décembre 2025, capturée sur une période de deux heures et 35 minutes: