Des chercheurs sud-coréens ont mis au point un muscle artificiel destiné aux robots humanoïdes, capable de soulever jusqu’à 4 400 fois son poids. Composé de polymères recouverts de microparticules magnétiques contrôlables, ce matériau imite la contraction et le relâchement des muscles naturels. Il offrirait ainsi un haut degré de flexibilité tout en supportant d’importantes densités de travail – une combinaison jusqu’ici difficile à atteindre pour cette technologie.
Les muscles artificiels, actionneurs souples conçus pour reproduire la fonctionnalité et la flexibilité des muscles biologiques, constituent l’un des composants essentiels de la robotique de nouvelle génération et des dispositifs biomédicaux. Par rapport aux actionneurs rigides tels que les pistons pneumatiques, ils présentent une plus grande polyvalence, un poids réduit et une intégration plus aisée dans des systèmes complexes comme les robots humanoïdes.
Ces atouts permettent des interactions plus sûres et adaptatives, aussi bien dans les processus de travail homme-robot que dans des environnements dynamiques. Il existe aujourd’hui une vaste gamme de muscles artificiels : actionneurs à base de fils de nanotubes de carbone, d’élastomères diélectriques ou de cristaux liquides. Ces systèmes se distinguent par leur légèreté et leur grande flexibilité. Les élastomères diélectriques peuvent, par exemple, être déformés jusqu’à 250 % avec des temps de réponse de seulement 100 millisecondes.
Cependant, malgré leur souplesse, la plupart de ces dispositifs restent limités en matière de résistance. Ils ne peuvent supporter qu’une densité de travail relativement faible, c’est-à-dire une quantité d’énergie fournie par unité de volume. Cette faiblesse s’explique par le fait que leurs modules d’élasticité sont intrinsèquement peu résistants, ce qui réduit la force de sortie, la capacité de charge et la répétabilité des mouvements.
Ces limites constituent un frein majeur aux applications en robotique humanoïde, dont les premières perspectives concernent notamment des tâches exigeant le port de charges lourdes, comme le travail en entrepôt ou l’assistance aux personnes à mobilité réduite. Pour dépasser ces contraintes, des chercheurs de l’Institut national des sciences et technologies d’Ulsan (UNIST), en Corée du Sud, ont conçu un muscle artificiel à la fois souple et capable de supporter une grande densité de travail.
D’après Hoon Eui Jeong, professeur de génie mécanique à l’UNIST et coauteur principal de l’étude, « ces recherches permettent de surmonter la limitation fondamentale des muscles artificiels traditionnels, soit très extensibles mais faibles, soit forts mais rigides. Notre matériau composite combine ces deux propriétés, ouvrant la voie à des robots souples plus polyvalents, à des dispositifs portables et à des interfaces homme-machine plus intuitives. »
Un muscle qui se contracte, se rigidifie et se relâche à volonté
Le muscle artificiel mis au point par les chercheurs est un actionneur composite magnétique haute performance. Il se compose d’un complexe de polymères imitant la contractilité et la flexibilité des muscles naturels. L’un des polymères, à rigidité modulable, est intégré à une matrice recouverte de microparticules magnétiques, dont le comportement peut être ajusté à la demande pour modifier la rigidité du muscle.
Plus précisément, le muscle repose sur deux mécanismes de réticulation : un réseau à liaisons covalentes (dans lequel les atomes partagent des électrons pour atteindre une configuration stable) et un second, un réseau réversible à interactions physiques. Cette combinaison confère au muscle la durabilité nécessaire à un fonctionnement prolongé tout en conservant une grande souplesse.


La résistance, quant à elle, est assurée par le réseau physique et par les microparticules magnétiques. Celles-ci sont dispersées dans la matrice polymère et activées par un liquide incolore à base d’octadécyltrichlorosilane. Ce liquide agit comme un déclencheur, permettant l’activation des particules magnétiques lorsque le muscle est soumis à une forte densité de travail. Il retrouve ensuite sa souplesse lorsque cette densité diminue.

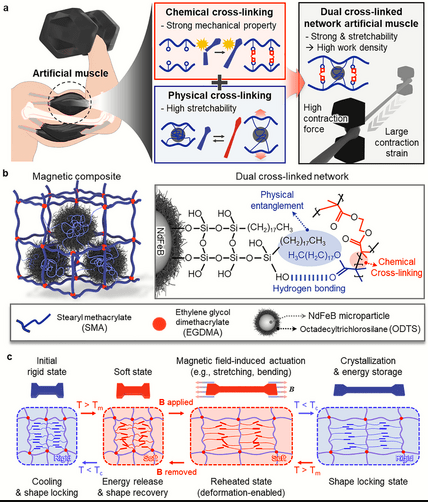 Stratégie de double réticulation et mécanisme d’actionnement thermomécanique des muscles artificiels magnétiques. a) Illustration schématique du réseau polymère à double réticulation, intégrant des réticulations chimiques et physiques pour une robustesse et une déformabilité mécaniques élevées. b) Composition structurale du composite magnétique, constitué d’une matrice polymère thermoréactive dans laquelle sont dispersées uniformément des microparticules de NdFeB traitées à l’ODTS. c) Mécanisme d’actionnement thermo-magnétique basé sur la cristallisation/fusion réversible de longues chaînes latérales alkyles et la déformation induite par un champ magnétique, permettant une modulation programmable de la rigidité et de la forme. © Somi Kim et al.
Stratégie de double réticulation et mécanisme d’actionnement thermomécanique des muscles artificiels magnétiques. a) Illustration schématique du réseau polymère à double réticulation, intégrant des réticulations chimiques et physiques pour une robustesse et une déformabilité mécaniques élevées. b) Composition structurale du composite magnétique, constitué d’une matrice polymère thermoréactive dans laquelle sont dispersées uniformément des microparticules de NdFeB traitées à l’ODTS. c) Mécanisme d’actionnement thermo-magnétique basé sur la cristallisation/fusion réversible de longues chaînes latérales alkyles et la déformation induite par un champ magnétique, permettant une modulation programmable de la rigidité et de la forme. © Somi Kim et al.5 kg de charge pour seulement 1,3 g
Pour évaluer ses performances, les chercheurs ont procédé à un test de traction uniaxiale, consistant à appliquer une force de traction sur l’échantillon jusqu’à sa rupture. La mesure de l’allongement en fonction de la force appliquée détermine ainsi la résistance maximale à la traction.
Les résultats – détaillés dans la revue Advanced Functional Materials – montrent que le muscle, d’un poids de seulement 1,3 gramme, peut supporter jusqu’à 5 kilogrammes de charge, soit environ 4 400 fois son propre poids. Il atteint une contractilité maximale de 86,4 % (contre 40 % pour un muscle humain) et supporte une densité de travail de 1 150 kilojoules par mètre cube, environ trente fois supérieure à celle d’un muscle humain.
 L’électron est une particule élémentaire qui, avec les protons et les neutrons, constitue les atomes. C’est donc l’un des composants principaux de la matière baryonique. À ce titre, il revêt... [...]
L’électron est une particule élémentaire qui, avec les protons et les neutrons, constitue les atomes. C’est donc l’un des composants principaux de la matière baryonique. À ce titre, il revêt... [...]