
Dans le règne animal, la capacité à marcher s’acquiert généralement de quelques minutes à quelques heures après la naissance. Ce trait évolutif permet ainsi aux différentes espèces de rapidement s’adapter afin de pouvoir échapper aux prédateurs dès le plus jeune âge. C’est un exploit évolutif étonnant qui inspire depuis longtemps les biologistes et les ingénieurs. Et maintenant, une équipe de chercheurs de l’USC est devenue la première à créer un membre robotique contrôlé par IA, dirigé par des tendons ressemblant à ceux des animaux, permettant la marche, une tâche pour laquelle le robot n’a jamais été explicitement programmé.
Francisco J. Valero-Cuevas et ses collègues ont développé un algorithme bio-inspiré qui peut apprendre une nouvelle fonction de marche de manière autonome après seulement 5 minutes de jeu non structuré, puis s’adapter à d’autres tâches sans programmation supplémentaire.
L’article, publié dans la revue Nature Machine Intelligence, ouvre des possibilités intéressantes pour comprendre le mouvement humain et le handicap, créer des prothèses réactives et des robots pouvant interagir avec des environnements complexes et changeants tels que l’exploration de l’espace, la recherche et le sauvetage.
« De nos jours, il faut l’équivalent de plusieurs mois ou années de formation pour qu’un robot soit prêt à interagir avec le monde, mais nous voulons leur attribuer l’apprentissage rapide et les adaptations que l’on voit dans la nature » déclare Valero-Cuevas.
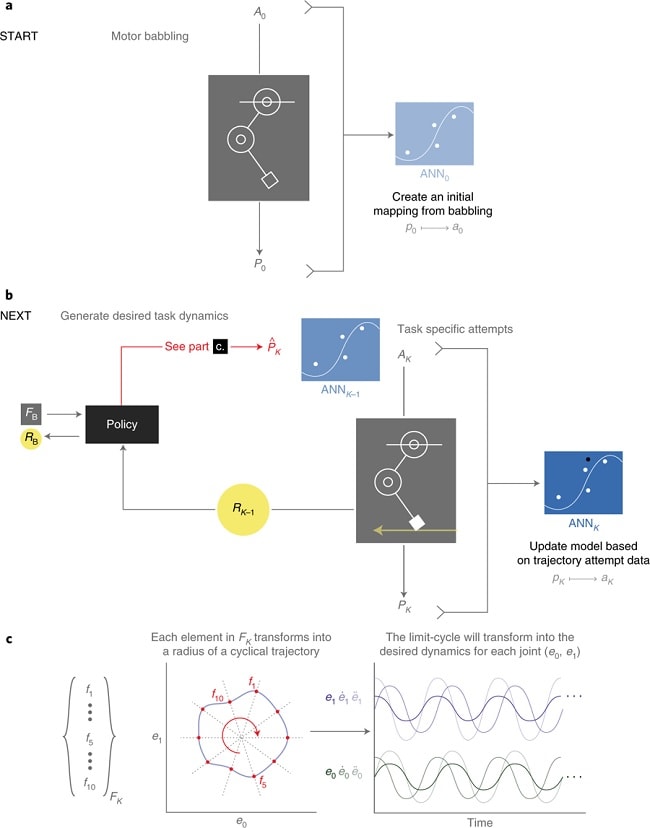
Marjaninejad, doctorant au département de génie biomédical de l’USC et auteur principal de l’étude, a déclaré que cette avancée est proche de l’apprentissage naturel qui se produit chez les bébés. Le chercheur explique que le robot a d’abord été autorisé à comprendre son environnement dans un processus de jeu libre (ou ce que l’on appelle le « babillage moteur »).
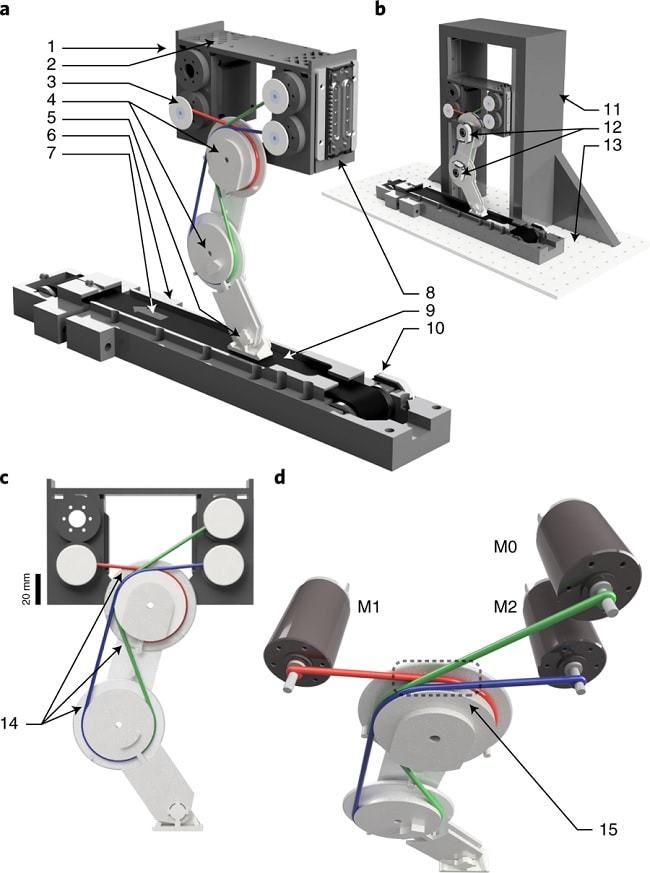
« Ces mouvements aléatoires de la jambe permettent au robot de créer une carte interne de son membre et de ses interactions avec l’environnement ». Les auteurs de l’article disent que, contrairement à la plupart des travaux actuels, leurs robots apprennent en s’exerçant, sans simulations informatiques préalables ni parallèles pour guider l’apprentissage.
Marjaninejad a également ajouté que cela est particulièrement important, car les programmeurs peuvent prévoir et coder pour plusieurs scénarios, mais pas pour tous les scénarios possibles — ainsi, les robots préprogrammés sont inévitablement sujets aux pannes ou à d’autres aléas. « Cependant, si vous laissez ces nouveaux robots apprendre de l’expérience pertinente, ils trouveront finalement une solution qui sera utilisée et adaptée en fonction des besoins. La solution ne sera peut-être pas parfaite, mais sera adoptée si c’est suffisant pour la situation ».
Au cours de ce processus de découverte de leur corps et de leur environnement, les membres des robots conçus par le laboratoire Valero Cuevas de l’USC utilisent leur expérience unique pour développer le modèle de démarche qui fonctionne assez bien pour eux, produisant des robots à mouvements personnalisés.
Les applications potentielles de cette technologie sont nombreuses, en particulier dans les technologies d’assistance, où des membres robotisés et des exosquelettes intuitifs répondant aux besoins personnels d’un utilisateur seraient d’une aide inestimable pour ceux qui ont perdu l’usage de leurs membres. « Les exosquelettes ou les appareils fonctionnels devront interpréter naturellement vos mouvements pour répondre à vos besoins » explique Valero-Cuevas.
Sur le même sujet : AntBot : le tout premier robot évoluant sans GPS pour se repérer

Selon les auteurs, la recherche aura également de fortes applications dans les domaines de l’exploration spatiale et des missions de sauvetage, permettant aux robots de faire ce qu’il faut faire sans être escortés ou supervisés alors qu’ils s’aventurent sur une nouvelle planète ou sur des terrains incertains et dangereux, à la suite de catastrophes naturelles. Ces robots seraient capables de s’adapter à une gravité faible ou élevée, à des roches instables et à de la boue après la pluie, par exemple.
« La capacité d’une espèce à apprendre et à adapter ses mouvements au fur et à mesure de l’évolution de son corps et de son environnement, constitue depuis le début un puissant moteur d’évolution » déclare Cohn. « Notre travail constitue un pas en avant pour permettre aux robots d’apprendre et de s’adapter à chaque expérience, tout comme le font les animaux ».
« J’imagine des robots musclés capables de maîtriser ce qu’un animal met des mois à apprendre, en quelques minutes seulement. Notre travail combinant ingénierie, intelligence artificielle, anatomie et neurosciences est une indication forte que cela est possible » conclut Urbina-Melendez.