Les recherches en bio-ingénierie prennent de l’ampleur ces dernières années et suscitent beaucoup d’espoir dans le monde médical. Dans cette optique, des chercheurs de l’Université chinoise de Hong Kong ont réussi à développer un microrobot capable de naviguer dans des vaisseaux sanguins. Véritable prouesse technique, ce robot peut nager dans la direction du flux sanguin mais aussi à contre-courant, afin de délivrer des particules anticoagulantes directement près des caillots.
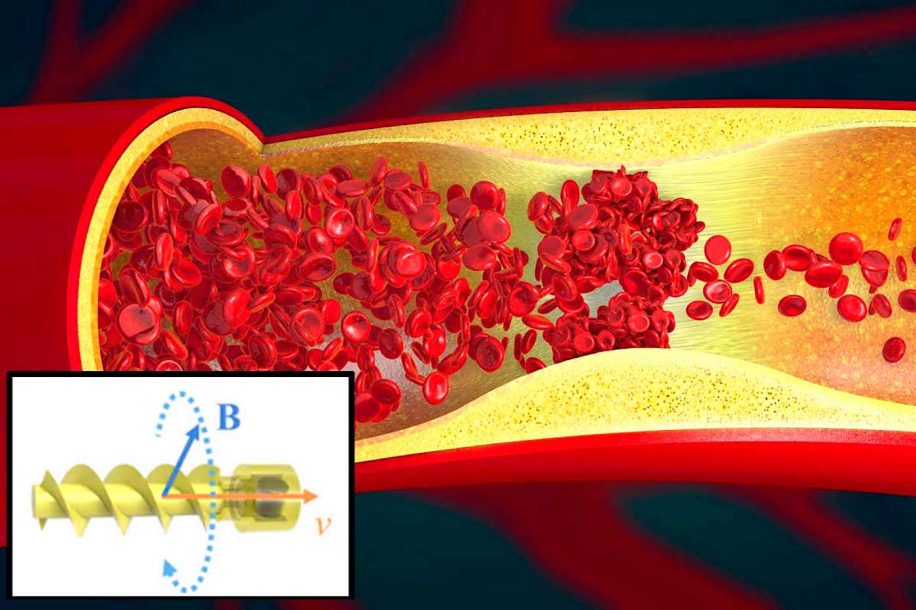
Inspiré de bactéries à cils ou flagelles comme l’Escherichia coli (E. coli), le microrobot se déplace dans le sang en se propulsant avec une minuscule hélice en forme de vis. Le mouvement est permis par un système de rotors similaire à ceux des bateaux. C’est ce qui lui permet de nager vers des zones précises et à contre-courant.
Lors des tests en laboratoire, les chercheurs ont pu montrer que le microrobot a pu livrer sa nanocargaison d’anticoagulants près d’un caillot sanguin. « La structure hélicoïdale est comme une hélice, donc [le robot] peut transporter la cargaison d’un point A à un point B », déclare le professeur Li Zhang, un des chercheurs du projet.
Zhang et son équipe l’ont testé sur une veine artificielle remplie de sang de porc et ont démontré que le médicament livré par le robot était 5 fois plus efficace que le médicament administré seul. Le microrobot peut ainsi déboucher un vaisseau 5 fois plus vite. De plus, cette nouvelle technologie permettrait de réduire les risques de formation de gros fragments, qui pourraient reboucher en aval la veine ou l’artère. Ce risque est souvent présent avec les méthodes classiques comme la chirurgie. Le microrotor du robot aiderait également à diffuser le médicament autour du site d’obstruction.
Tests de sécurité
Lors d’essais in vitro, l’équipe de recherche a utilisé des aimants externes pour faire tourner l’hélice du robot et le guider à travers une veine. Pour suivre ses déplacements de l’extérieur, ils ont utilisé un système à effet Doppler. Ce système est utilisé pour les échographies vasculaires ou angiographies. Il permet d’obtenir une image à l’aide d’ultrasons. Pour cela, il mesure la réflexion des ondes sonores qui traversent le sang.
Le robot a aussi un avantage de taille en étant microscopique, car cela réduit son frottement avec les parois des vaisseaux sanguins et diminue ainsi les risques de les endommager. « La capacité qu’ils ont à diriger le robot dans des environnements in vitro est assez agréable », a commenté Pierre Gélat, un ingénieur en mécanique de l’University College de Londres. Mais, « les défis consistent à savoir si cela répondra aux besoins cliniques non satisfaits à long terme et comment ils y arriveront », ajoute-t-il.
Des tests supplémentaires sont ainsi nécessaires pour mesurer réellement son efficacité, avant de pouvoir l’utiliser sur l’homme. L’une des difficultés supplémentaires sera de le faire parcourir de plus longues distances. De plus, le système vasculaire humain est largement plus grand et plus complexe. Le système immunitaire pourrait peut-être, par exemple, réagir en le considérant comme un corps étranger. Sans compter que le robot n’a pas encore été testé dans un environnement similaire au corps humain. L’utilisation initiale concernerait donc surtout les caillots les plus proches et accessibles, selon le professeur Zhang.

D’autres perspectives d’utilisation
Le microrobot de Zhang est également capable de diffuser d’autres substances dans le sang. « Si vous voulez livrer autre chose qu’un médicament, c’est également possible. Par exemple, les thérapies basées sur les cellules souches ou le chauffage localisé pour tuer les cellules cancéreuses », explique-t-il. Ces derniers nécessitent en effet une telle précision qu’une intervention plus localisée serait la plus efficace.
Prochainement, l’équipe de recherche compte entamer des tests dans des conditions plus similaires au corps humain.