Nous le savons depuis la nuit des temps, l’union fait la force. Et cette expression est surtout vraie pour les animaux situés en bas de la chaîne alimentaire. Les fourmis par exemple, travaillent souvent en groupe pour accomplir certaines tâches qui leur seraient impossibles à accomplir seules. Elles peuvent par exemple former des « ponts vivants » entre deux points et faire passer leurs camarades. Depuis les débuts de la robotique, les chercheurs s’inspirent de la nature pour concevoir des systèmes efficaces ou pour perfectionner des modèles existants. Récemment, des ingénieurs sont parvenus à mettre au point de petits robots quadrupèdes travaillant en essaim pour surmonter des obstacles, à l’image des fourmis.
En l’espace d’un instant, si vous laissez libre cours à votre esprit, vous serez en mesure d’imaginer d’innombrables applications concrètes pour un tel système robotisé. Citons notamment le sauvetage (catastrophes naturelles), où les robots pourraient évoluer ensemble entre les débris pour identifier des victimes. Ou encore l’exploration minière, sans oublier le domaine duquel ils sont issus, contribuer à la recherche en robotique.
Ces exemples mettent non seulement en évidence l’utilité d’un fonctionnement en essaim, mais aussi l’avantage d’un robot doté de pattes (au lieu de roues). Évidemment, un robot à roues serait limité dans de nombreux environnements.
L’union fait la force
En tenant compte de ce besoin et en s’inspirant des fourmis, la professeure Yasemin Ozkan-Aydin de l’université de Notre-Dame (États-Unis) et son équipe ont mis au point un ensemble de robots quadrupèdes imprimés en 3D capables de travailler ensemble pour surmonter ces difficultés. On appelle cette branche de la robotique la « robotique en essaim ».
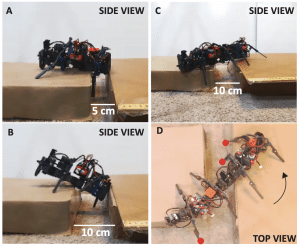
Chaque spécimen mesure entre 15 et 20 cm de long et intègre une batterie au lithium-polymère, un microprocesseur, un capteur de lumière monté à l’avant ainsi que deux capteurs tactiles magnétiques — à l’avant et à l’arrière. Les quatre pattes, très flexibles, permettent de réduire le nombre de capteurs et de pièces supplémentaires et confèrent aux robots un niveau d’intelligence mécanique, ce qui les aide à interagir avec des terrains accidentés ou irréguliers. Les détails ont été publiés dans la revue Science Robotics.
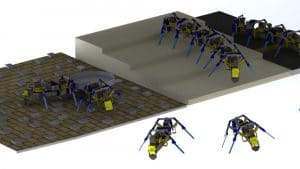
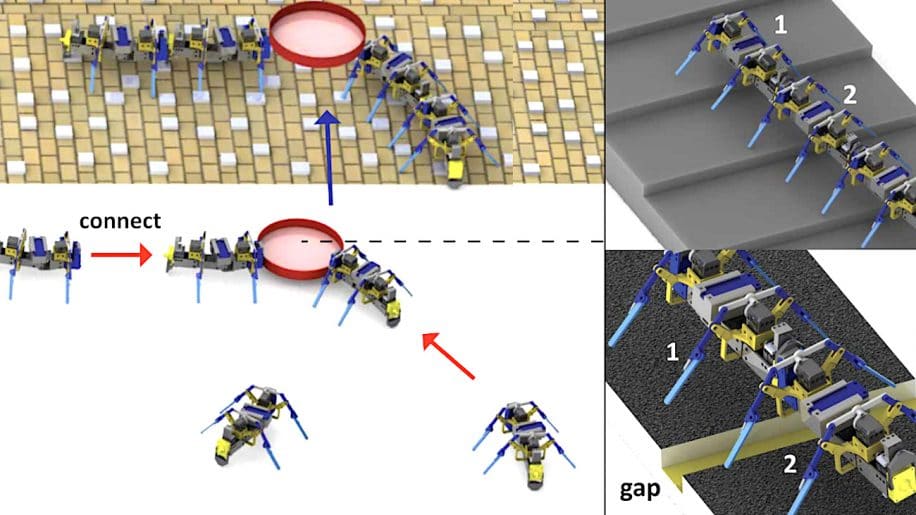
Dans une expérience visant à tester leur capacité à surmonter les obstacles en essaim, les chercheurs ont placé des blocs de bois collés sur des panneaux de particules entre un robot et le point d’arrivée (l’objectif) puis ont observé comment il se comportait. Confronté à l’obstacle, le robot a comme prévu transmis un signal aux autres unités situées à proximité, qui l’ont aussitôt rejoint.
Ainsi, les robots ont formé un véritable pont qui a permis à l’ensemble d’atteindre l’objectif. Ils peuvent également se servir de cette capacité pour transporter des objets trop grands ou trop lourds pour leur taille et poids (cf. image de titre).
Sauvetage, exploration spatiale, surveillance de l’environnement…
En plus de son utilisation dans les opérations de sauvetage, ce système pourrait être utilisé pour l’exploration spatiale, la surveillance de l’environnement ou l’étude de la dynamique collective d’insectes. Ozkan-Aydin travaille actuellement sur l’amélioration de la sensibilité, des capacités de collaboration et de l’autonomie de ses robots.

« Pour des systèmes d’essaims fonctionnels, la technologie des batteries doit être améliorée », déclare Ozkan-Aydin dans un communiqué. « Nous avons besoin de petites batteries capables de fournir plus de puissance, idéalement d’une durée de plus de 10 heures. Sinon, l’utilisation de ce type de système dans le monde réel n’est pas viable ». Parmi les autres limitations, il y a également la nécessité de disposer d’un plus grand nombre de capteurs et de moteurs plus puissants afin de répondre à certains besoins pratiques, tout en conservant une taille réduite par unité.
« Vous devez penser à la façon dont les robots fonctionneraient dans le monde réel, donc vous devez réfléchir à la quantité d’énergie nécessaire, à la taille de la batterie que vous utilisez. Tout est limité, donc vous devez prendre des décisions concernant chaque partie de la machine », ajoute Ozkan-Aydin.
Vidéo présentant les différentes capacités des robots quadrupèdes :