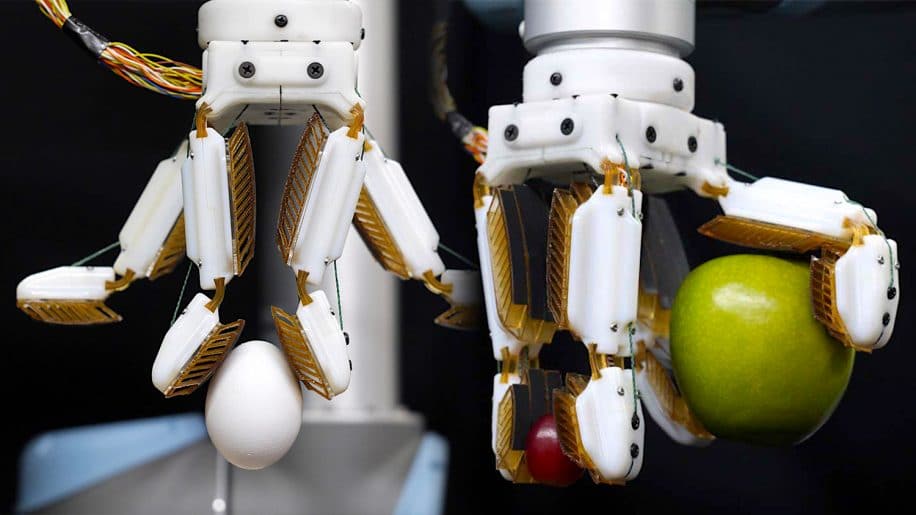
L’un des défis majeurs dans la conception d’une main robotisée réside dans le fait de lui conférer suffisamment de souplesse de fonctionnement pour qu’elle puisse saisir des objets de différentes tailles et poids. Une main robotique humanoïde par exemple, confère généralement plus de précision et de délicatesse, mais n’est pas avantageuse lorsqu’il s’agit de soulever des charges lourdes. Des chercheurs pensent aujourd’hui avoir la solution « ultime » : une main robotique simple, mais dotée de coussinets synthétiques inspirés du gecko pour adhérer plus facilement aux petits objets. Le résultat est un manipulateur robotisé polyvalent, capable de soulever des objets lourds tout comme saisir un raisin sans l’abimer.
« On voit des mains robotisées faire une préhension puissante et une préhension de précision, ce qui laisse entendre qu’elles peuvent tout faire entre les deux », explique dans un communiqué Wilson Ruotolo, ancien étudiant diplômé du Biomimetics and Dextrous Manipulation Lab de l’université de Stanford. Et bien entendu, c’est tout sauf le cas… « Ce que nous voulions aborder donc, c’est comment créer des manipulateurs qui soient à la fois précis et forts », ajoute Ruotolo.
L’équipe de recherche, dirigée par Mark Cutkosky, professeur à l’école d’ingénierie de Stanford et auteur principal de cette nouvelle étude, a alors mis au point une main robotique innovante baptisée « farmHand ». Wilson Ruotolo et Dane Brouwer, un étudiant diplômé du Biomimetics and Dextrous Manipulation Lab, sont les deux ingénieurs ayant contribué le plus au projet — tous deux ayant conçu la version de base de la main robotique. La création finale est décrite dans un article publié récemment dans la revue Science Robotics.
La main robotique de base a été dotée de deux types d’inspirations biologiques : alors que ses doigts à articulations multiples rappellent une main humaine (bien qu’elle en comporte quatre), ils sont recouverts d’un matériau adhérent inspiré des pattes de geckos. Pour le concevoir, les chercheurs se sont basés sur la structure recouvrant les doigts des geckos. Les premiers prototypes du revêtement adhésif ont été mis au point au cours de la dernière décennie au Biomimetics and Dextrous Manipulation Lab.
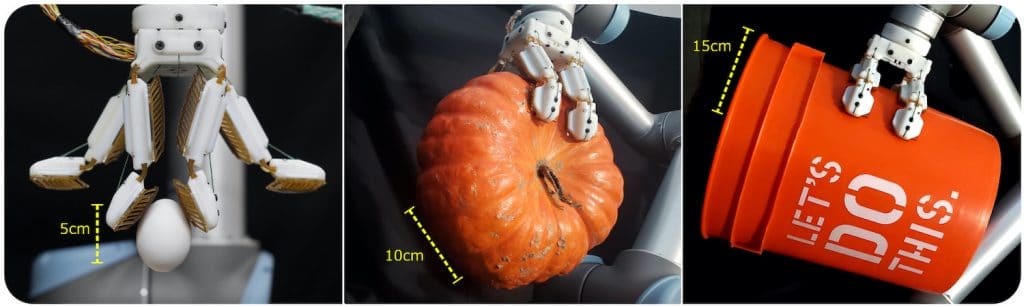
Selon les résultats des premiers tests, la farmHand est ainsi capable de manipuler avec aisance une grande variété d’objets, dont des œufs, des grappes de raisin, des assiettes, des cruches de liquide, des ballons de basket et même une meuleuse d’angle. De plus, le matériau adhérent ne laisse aucun résidu collant ou salissant. Du fait de ces nombreux avantages par rapport à d’autres systèmes de manipulation, des applications commerciales pour la farmHand sont déjà envisagées.
Une diversité d’utilisation impressionnante
Contrairement à ce que l’on pourrait croire, l’utilisation du matériau adhérent sur une pince anthropomorphe à plusieurs doigts était un véritable défi. Une attention particulière aux tendons contrôlant les doigts de la farmHand a été nécessaire, sans oublier la difficulté de conception des coussinets situés sous le revêtement adhésif.
Comme les orteils du gecko, cet adhésif synthétique permet une prise solide grâce à des « rabats » (crochets) microscopiques. Lorsqu’ils sont en contact avec une surface, ces rabats créent une force de Van der Waals — une force intermoléculaire faible qui résulte de différences subtiles dans la position des électrons à l’extérieur des molécules. Ainsi, le matériau permet une forte adhérence sans apport supplémentaire de force.
« Les premières applications des adhésifs inspirés du gecko concernaient les robots grimpeurs, les escaladeurs ou la saisie d’objets très grands et très lisses. Mais nous avons toujours eu à l’esprit de les utiliser pour des applications plus basiques », a déclaré Cutkosky. « Le problème, c’est qu’il s’avère que ces revêtements sont en fait très difficiles à utiliser ».
En effet, lors de la conception, les chercheurs ont rapidement fait face à un problème de taille : les matériaux adhésifs inspirés des geckos, qui ne sont pas une nouveauté en soi, doivent s’accrocher à une surface d’une manière particulière afin de permettre à la force de Van der Waals d’apparaître. Lorsqu’il s’agit de saisir en douceur une surface plane, cela est assez facile à obtenir, mais la difficulté est tout autre lorsqu’une prise repose sur de multiples surfaces adhésives entrant en contact avec l’objet à différents angles, comme c’est le cas avec une main robotique de ce type.
Pour pallier ce problème, les chercheurs ont conçu des coussinets (placés sous le matériau adhésif) spécialement adaptés. Ces derniers sont constitués d’une structure nervurée pliable qui se déforme facilement. Quel que soit l’endroit ou l’angle de contact, les nervures se déforment de manière constante afin d’assurer des forces égales sur les coussinets adhésifs et d’empêcher qu’un seul d’entre eux ne glisse prématurément.
« Si vous déplacez ces nervures, le flambage se traduit par une force similaire, quel que soit l’endroit d’où vous partez », explique Brouwer. « C’est un comportement simple et physique qui pourrait être déployé même dans des domaines autres que la robotique, par exemple pour des chaussures spéciales ou des pneus tout-terrain ».
Un prototypage accéléré par l’impression 3D
Les tendons de la main robotique sont également cruciaux, car ils permettent un pincement dit en « hyperextension ». Alors que de nombreuses mains et pinces robotisées saisissent les objets en forme de « C », farmHand utilise l’extrémité de ses doigts pour appuyer la partie de l’objet concernée sur un coussinet adhésif. Cela permet aux adhésifs de travailler sur une plus grande surface.

Il a été particulièrement difficile d’obtenir une conception parfaite, notamment car les simulations informatiques existantes ont du mal à prévoir les performances réelles des objets mous. Mais les chercheurs ont tiré un avantage considérable du fait qu’ils ont pu imprimer en 3D et tester de nombreux composants en plastique dur et mou dans des cycles relativement rapides. « Notre succès n’aurait peut-être pas été possible, ou du moins beaucoup plus lent, il y a seulement cinq ans », soulignent-ils.
D’autres améliorations pourraient être apportées à farmHand sous la forme de fonctions de retour d’information (détection tactile) qui aideraient les utilisateurs à comprendre comment la main s’agrippe (et comment cela pourrait encore être amélioré). « La plupart des asservissements tactiles sont réalisés en se concentrant sur les forces normales et la prise de décision de haut niveau, et souvent, les forces de cisaillement et les distributions de contraintes mécaniques normales sont négligées », écrivent les chercheurs dans leur article.
« Il existe donc de nombreuses possibilités d’adapter la théorie existante de sélection et de contrôle de la prise à un nouvel ensemble de contraintes et de mesures de performance, comme l’adaptation dynamique des configurations de la prise en fonction de l’évolution de la surface de contact afin d’utiliser ces adhésifs plus efficacement ». La déformation des structures nervurées souples permise avec la farmHand offre des possibilités de détection à l’aide de transducteurs piézorésistifs, magnétiques, capacitifs ou optiques, concluent-ils.
Vidéo de présentation de la farmHand, publiée par les chercheurs :
 L’électron est une particule élémentaire qui, avec les protons et
les neutrons, constitue les atomes. C’est donc l’un des composants
principaux de la matière baryonique. À ce titre, il revêt... [...]
L’électron est une particule élémentaire qui, avec les protons et
les neutrons, constitue les atomes. C’est donc l’un des composants
principaux de la matière baryonique. À ce titre, il revêt... [...]