
Le contrôle des robots avec l’esprit ne relève désormais plus de la science-fiction. En effet, depuis plusieurs années, il est possible de contrôler (avec une précision variable) des applications robotisées directement avec la pensée. Cela peut aller du déplacement d’un curseur sur un écran d’ordinateur au contrôle d’un bras robotique complet. Pour un contrôle précis et fluide cependant, il était jusqu’ici nécessaire d’avoir recours à un implant cérébral, mais cela est sur le point de changer grâce à des chercheurs de l’Université Carnegie-Mellon.
Une équipe de chercheurs l’université Carnegie-Mellon (CMU) a créé le premier bras robotique non invasif contrôlé par la pensée, qui présente le genre de mouvement fluide et continu auparavant réservé aux systèmes impliquant des implants cérébraux. Cela nous rapproche ainsi d’un avenir dans lequel nous pourrons tous utiliser notre esprit pour contrôler différents objets autour de nous.
Les scientifiques ont utilisé une combinaison de techniques de détection et d’apprentissage automatique pour créer une interface cerveau-ordinateur (BCI) capable d’acheminer des signaux au plus profond du cerveau, expliquent-ils dans le cadre de l’étude publiée la semaine dernière dans la revue Science Robotics. L’activité cérébrale des participants était mesurée par le biais d’un casque EEG.
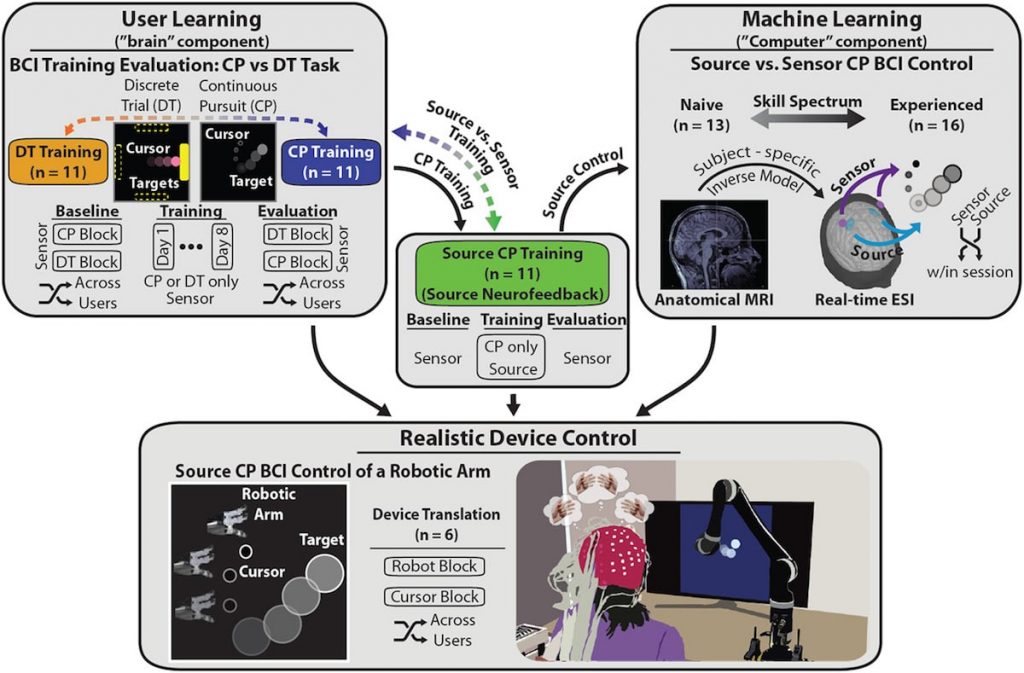
Pour tester leur système, ils ont demandé aux participants de l’utiliser pour diriger un bras robotique de manière à pointer (avec le bras) un curseur alors qu’il se déplaçait sur un écran d’ordinateur. Le bras robotique était capable de suivre en continu le curseur en temps réel, sans mouvements saccadés. Une première pour un système BCI (interface cerveau-ordinateur) non invasif.
Le cadre d’étude traitait à la fois des aspects de la technologie BCI liés à l’apprentissage machine et à l’apprentissage par l’utilisateur avant d’être mis en œuvre dans le contrôle d’un dispositif robotique réaliste. L’apprentissage de l’utilisateur a été abordé en étudiant les effets comportementaux et physiologiques de l’entraînement BCI à l’aide d’un neurofeedback au niveau du capteur. Cette conception a permis de déterminer à la fois la tâche optimale et le domaine du neurofeedback pour l’acquisition des compétences BCI.
Bien que les recherches soient ici plutôt focalisées sur des robots à contrôle mental (ou des prothèses) destinés aux personnes souffrant de troubles du mouvement, de paralysie ou amputées, Bin He, chercheur à la CMU, envisage un avenir dans lequel la technologie est omniprésente et profite à la population dans son ensemble.
Vous allez aussi aimer : Une jambe robotique apprend à marcher sans avoir été directement programmée pour le faire
« Malgré les difficultés techniques liées à l’utilisation de systèmes non invasifs de détection des signaux, nous nous engageons pleinement à développer cette technologie et à la rendre sûre et économique pour les personnes qui peuvent en bénéficier », a déclaré He dans un communiqué de presse.

« Ce travail représente une étape importante dans le domaine des interfaces cerveau-ordinateur non invasives, une technologie qui pourrait un jour devenir une assistance omniprésente profitant à la population dans son ensemble, comme les smartphones » conclut-il.
La vidéo ci-dessous présente le système et son fonctionnement :