
Des bioingénieurs de l’hôpital pour enfants de Boston, aux États-Unis, rapportent aujourd’hui la toute première démonstration d’un robot capable de naviguer de manière autonome dans le corps. En effet, un cathéter robotique utilisant un nouveau capteur basé sur une intelligence artificielle (IA) et le traitement d’image, se dirige lui-même vers une valve cardiaque qui fuit.
C’est dans un modèle animal de réparation de valvule cardiaque, que l’équipe a réussi à programmer un cathéter robotique pouvant se frayer un chemin le long des parois d’un cœur battant et rempli de sang, jusqu’à une valvule qui fuit. Et tout cela, de manière complètement autonome, sans l’aide d’un chirurgien.
Il n’est pas inhabituel aujourd’hui, et ce depuis plus d’une décennie, que les chirurgiens à travers le monde entier utilisent des robots commandés par le biais de manettes afin de réaliser des opérations. De plus, nous savons à présent qu’il est possible de diriger de minuscules robots à travers le corps par des forces externes telles que le magnétisme.
Cependant, le chercheur principal d’une nouvelle étude qui a mis en lumière ce nouveau robot autonome, Pierre Dupont, PhD et responsable de la bio-ingénierie cardiaque pédiatrique à l’hôpital pour enfants de Boston a déclaré : « À ma connaissance, il s’agit du premier rapport sur l’équivalent d’une voiture autonome conduisant vers une destination souhaitée à l’intérieur du corps ».
Dupont et son équipe pensent que dans le futur, des robots autonomes de ce type pourraient bien assister les chirurgiens lors d’opérations complexes, permettant de réduire la fatigue de ces derniers et leur permettant de se concentrer sur les manœuvres plus difficiles et plus complexes à réaliser, améliorant ainsi les résultats généraux des opérations.
« La bonne façon de penser à cela est de faire une analogie avec un pilote de chasse et un avion de chasse. L’avion assume les tâches de routine, comme piloter l’avion, afin que le pilote puisse se concentrer sur les tâches de niveau supérieur de la mission », explique-t-il.
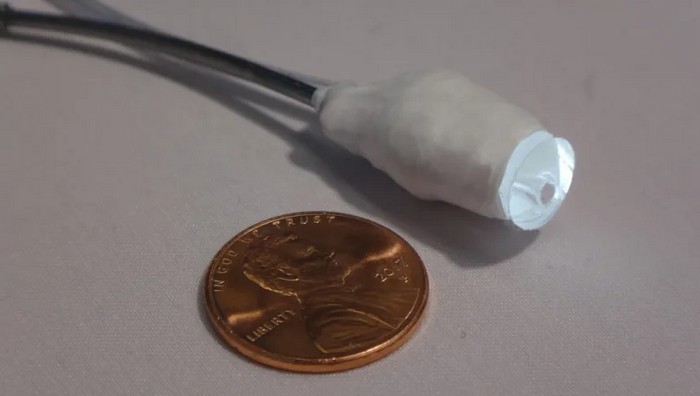
Le cathéter robotique de l’équipe utilise un capteur optique tactile développé dans le laboratoire de Dupont, basé sur une carte de l’anatomie cardiaque et des scanners préopératoires. Le capteur tactile exploite une intelligence artificielle (IA) et des algorithmes de traitement d’image pour permettre au cathéter de déterminer où il se trouve dans le cœur et où il doit aller.
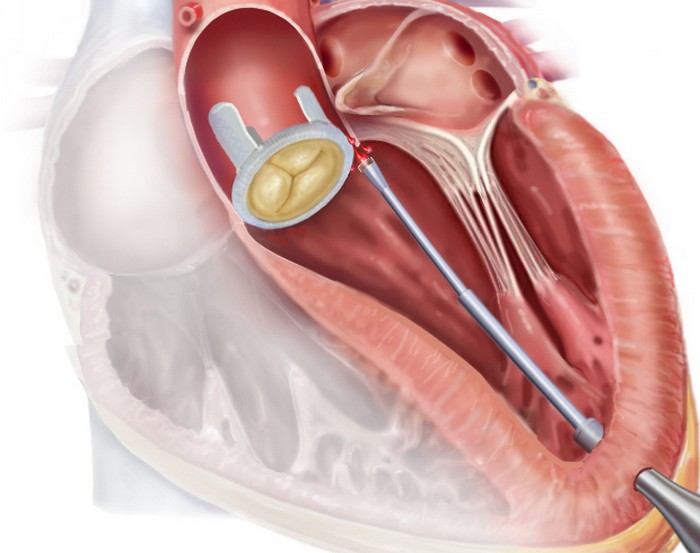
Pour la démonstration, l’équipe a effectué une procédure très exigeante sur le plan technique, appelée fermeture paravalvulaire des fuites aortiques, qui permet des réparer des valvules cardiaques qui ont commencé à fuir sur les bords.
Dans le cadre de l’expérience, l’équipe a construit ses propres valves. Une fois que le cathéter robotique a atteint l’emplacement de la fuite, un chirurgien cardiaque expérimenté a pris le contrôle et a inséré un bouchon pour fermer la fuite. Au cours de plusieurs essais répétés, le cathéter robotique a réussi à naviguer vers les valvules cardiaques en à peu près le même temps que le chirurgien (qui lui s’aidait d’un outil manuel ou d’un robot contrôlé par joystick).
Les chercheurs ont souhaité s’inspirer de la biologie lors de l’élaboration de leur robot autonome. Ainsi, c’est grâce à une technique de navigation appelée « suivi de mur », que le capteur tactile optique du cathéter robotique peut échantillonner son environnement à intervalles réguliers, de la même manière que l’antenne des insectes ou les moustaches des rongeurs échantillonnent leur environnement pour créer des cartes mentales d’environnements sombres et inconnus.
De plus, le capteur indique à la sonde si elle touche du sang, la paroi du cœur ou une valve (à travers les images d’une caméra montée sur l’embout du robot) et en mesurant la force avec laquelle elle presse contre la paroi (pour l’empêcher d’endommager le cœur battant).
Les données des algorithmes d’imagerie préopératoire et d’apprentissage automatique ont aidé le cathéter à interpréter les caractéristiques visuelles. De cette manière, le cathéter robotique a avancé seul à partir de la base du cœur, le long de la paroi du ventricule gauche et autour de la valve qui fuit jusqu’à atteindre l’emplacement exact de la fuite.
« Les algorithmes aident le cathéter à déterminer le type de tissu qu’il touche, où il se trouve dans le cœur et comment il devrait choisir son prochain mouvement pour arriver là où nous voulons qu’il aille », explique Dupont.
Bien que le robot autonome ait mis un petit peu plus de temps que le chirurgien à atteindre la valve qui fuyait, sa technique de suivi de paroi signifiait qu’il prenait le chemin le plus long. « Le temps de navigation était statistiquement équivalent pour tous, ce que nous trouvons assez impressionnant étant donné que le robot se trouve dans un cœur battant, rempli de sang, et qu’il essaye d’atteindre une cible millimétrique sur une valve spécifique », a déclaré Dupont.
Ce dernier a également ajouté que la capacité du robot à visualiser et à détecter son environnement pourrait éliminer le recours à l’imagerie fluoroscopique, qui est généralement utilisée dans cette opération et expose les patients à des rayonnements ionisants.
Dupont a affirmé que ce projet était de loin le plus ambitieux de toute sa carrière. Durant l’expérience, tandis que le chirurgien cardiaque pouvait se reposer un peu, le robot quant à lui continuait de chercher la fuite. Tout cela n’était pas de tout repos pour l’équipe de Dupont : en effet, les ingénieurs devaient parfois reprogrammer le robot en cours d’opération pour perfectionner la technologie.

« Je me souviens des moments où les ingénieurs de notre équipe sont sortis épuisés de la salle d’opération, mais nous avons surmonté ces défis. Maintenant que nous avons démontré que la navigation autonome est possible, il y a tellement de choses qui sont possibles », a déclaré Dupont.
Vous aimerez également : Une jambe robotique apprend à marcher sans avoir été directement programmée pour le faire
De nombreux chercheurs pensent que ce robot autonome pourrait bel et bien être une importante innovation quant aux opérations du futur. En effet, certains intervenants en cardiologie qui connaissent le travail de Dupont envisagent d’utiliser ces robots pour bien plus d’applications que simplement de la navigation.
Comme par exemple pour l’exécution de tâches routinières de cartographie cardiaque. Certains envisagent également cette technologie pour fournir des conseils lors de cas particulièrement difficiles ou inhabituels, ou encore pour aider à des opérations dans des régions du monde qui manquent de chirurgiens hautement expérimentés.
Tandis que la Food and Drug Administration (FDA) commence à élaborer un cadre réglementaire pour les dispositifs activés par l’intelligence artificielle, Dupont envisage la possibilité que des robots de chirurgie autonomes voient le jour à travers le monde entier, mettant en commun leurs données pour améliorer en permanence les performances.
« Chaque clinicien dans le monde opérerait avec un niveau de compétence et d’expérience équivalent à celui des meilleurs dans son domaine. Cela a toujours été la promesse des robots médicaux. L’autonomie peut être ce qui nous permettra d’atteindre ce but », a ajouté Dupont.